{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 u013721521 的文章《【目标跟踪】KCF高速跟踪详解》','https://www.xiaopingtou.net/article-80630.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
Henriques, João F., et al. “High-speed tracking with kernelized本文的跟踪方法效果甚好,速度奇高,思想和实现均十分简洁。其中利用循环矩阵进行快速计算的方法尤其值得学习。另外,作者在主页上十分慷慨地给出了各种语言的实现代码。
correlation filters.” Pattern Analysis and Machine Intelligence, IEEE
Transactions on 37.3 (2015): 583-596.
本文详细推导论文中的一系列步骤,包括论文中未能阐明的部分。请务必先参看这篇简介循环矩阵性质的博客。
思想
一般化的跟踪问题可以分解成如下几步:1. 在
2. 在
3. 响应最强的采样作为本帧位置
循环矩阵表示图像块
在图像中,循环位移操作可以用来近似采样窗口的位移。
训练时,围绕着当前位置进行的一系列位移采样可以用二维分块循环矩阵
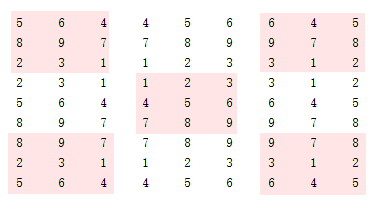
这样的
线性回归训练提速
此部分频繁用到了循环矩阵的各类性质,请参看这篇博客。线性回归的最小二乘方法解为: