{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 yjq1059959184 的文章《PMSM控制01-在MATLAB/sinmulink仿真实现-计时器比较法输出SVPWM波形》','https://www.xiaopingtou.net/article-80918.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
由于本人转入新能源汽车电机控制行业,因此日后会陆续更新汽车电机、控制器、控制算法、电路等的文章。当然别的DIY文章也会继续更,工作、兴趣、生活,该有的都得有。
以下正文:
simulink中实现计时器比较法输出SVPWM控制波形:
计时器比较法是控制中常用的算法,在DSP中基本都使用此算法输出SVPWM,因为与硬件原理相适用,这也是为后续在硬件上实现DSP控制做铺垫。

scope2显示的输出波形:

clock模块用于给定系统输入时间,根据系统时间产生正弦余弦波形:


clock输出的即是一个计时累加的信号,最终值等于simulink仿真时间。 双击matlab function,弹出界面进行如下配置,模块输出的是一个复数。带i的为虚部。 输入参数即是一个实部虚部之间相位差pi/2的复数,至于为何三角函数内乘100,因为输入参数u与仿真时间相关,u为0-0.01的递增值,乘100保证相位为0~pi,起码有半个周期的输入,是修正数量级用的参数。

complex to Magnitude-Angle模块分解复数,为幅值和角度: 该模块专用于分解复数,复数的英文即complex。

再下一步,将产生的幅值和角度输入S-function模块: S-function是simulink中供用户调用自定义脚本函数的模块: 自定义的m文件,下面对m文件代码进行分析: 对输入的连续电压矢量进行离散化:
function[sys,x0,str,ts] = SVPW_TimeCounterCompare003(t,x,u,flag) tsam = 0.02/20; switchflag, case 0 [sys,x0,str,ts] = Initialization(tsam); case 3 sys = mdlOutputs(t,x,u); case {1,2,4,9} sys = []; otherwise error(['Unhandled flag=',num2str(flag)]); end function[sys,x0,str,ts] = Initialization(tsam) sizes = simsizes;%simsizes用于设置Sfunction参数状态 sizes.NumContStates = 0; sizes.NumDiscStates = 0; sizes.NumOutputs = 2; sizes.NumInputs = 2; sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1;%采样时间 sys = simsizes(sizes); x0 = []; str = []; ts = [tsam 0 ]; functionsys = mdlOutputs(t,x,u) sys = [u(1),u(2)];
下一步是进入包含核心计算公式的代码:
第二个matlab dunction模块配置: 直接调用m文件。
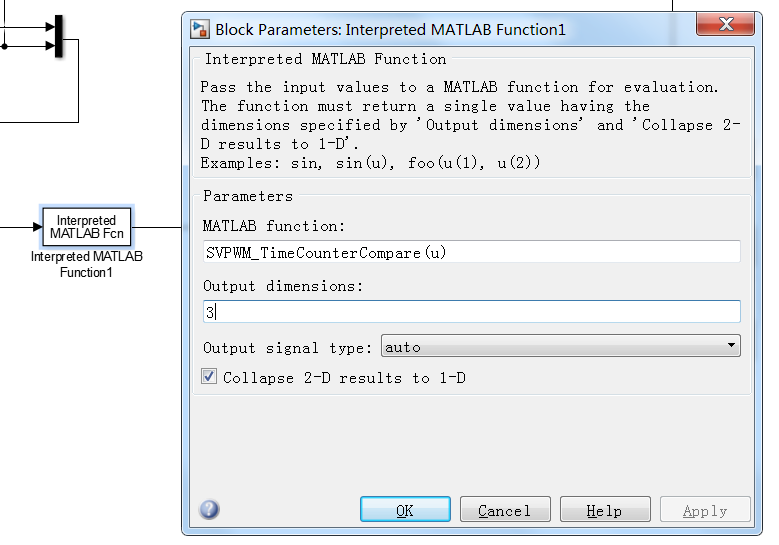
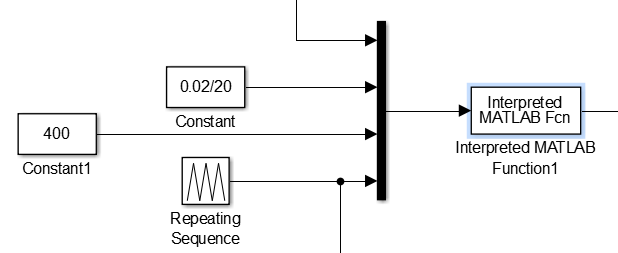
左边输入4个信号5个量,第一个是上一步分解的幅度角度两个值组成的一维数组,第二个输入是采样频率,第三个是直流电压值,第四个为比较用的三角波: 这些量作为输入量,MATLAB Function模块调用的代码:
functiony = SVPWM_TimeCounterCompare(u) Ve = u(1); Ph = u(2); te = u(3); Udc = u(4); du = pi/3; %定义每个矢量开关信号 u0 = [0 0 0]; u1 = [1 0 0]; u2 = [1 1 0]; u3 = [0 1 0]; u4 = [0 1 1]; u5 = [0 0 1]; u6 = [1 0 1]; u7 = [1 1 1]; %判断矢量所处的扇区,选择对应的ua,ub,phe,根据所在扇区选择合成的所需的一组矢量
ifPh>0 && Ph<=du Phe = Ph; h = 1; ua = u1; ub = u2; elseifPh>du && Ph<=2*du Phe=2*du-Ph; h = 2; ua = u3; ub = u2; elseifPh>2*du && Ph<=3*du Phe = Ph-2*du; h = 3; ua = u3; ub = u4; elseifPh>-3*du && Ph<=-2*du Phe = -Ph-2*du; h = 4; ua = u5; ub = u4; elseifPh>-2*du && Ph<=-du Phe = Ph+2*du; h = 5; ua = u5; ub = u6; else Phe = -Ph; h = 6; ua = u1; ub = u6; end %计算ta,tb,t0(ms) A = Udc; ta = 1.5*(cos(Phe)-1/sqrt(3)*sin(Phe))*Ve*te/A; tb = sqrt(3)*Ve*sin(Phe)*te/A; t0 = te-ta-tb; ift0<0 ta = ta/(ta/tb)*te; tb = te-ta; end %时间折算成电压值 usw1 = Udc*t0/te/2; usw2 = Udc*ta/te+usw1; usw3 = Udc*tb/te+usw2; %判断并输出 %u(5)即为输入的三角波值 ifu(5)>=0 && u(5)
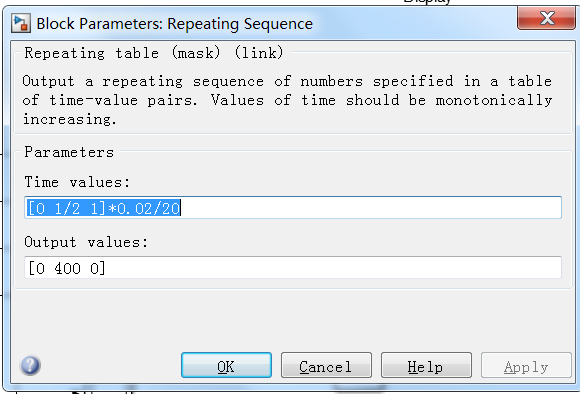
另外说明一下几个模块的配置: 此为三角波发生模块,三角波模块在SVPWM发生中用作比较作用,(与调制信号比较,这个模型的调制信号就是第一个matlab function模块产生的复数信号转换成的相位幅度信号,实际就是正余弦波) 配置如下:
最终在scope2可以看到,模型输出为:

然后,再把SVPWM信号连接到逆变器上,输出正弦波: 整体模型如下:
 这一块为模拟逆变器用,switch参数如下:
具体配置原理是,由于SVPWM控制信号发生侧输出的是数字信号,switch的逻辑关系设置为:若输入信号大于0.5,则输出200,小于0.5,则输出-200.由三个switch模块组成三路输出。
这一块为模拟逆变器用,switch参数如下:
具体配置原理是,由于SVPWM控制信号发生侧输出的是数字信号,switch的逻辑关系设置为:若输入信号大于0.5,则输出200,小于0.5,则输出-200.由三个switch模块组成三路输出。

这是模拟真实逆变器的仿真图(只作为说明,此模型中不用到):

这是真实逆变器的原理图:
 逆变器的原理即是数字控制信号通过控制6个IGBT的关断,控制UVW三相输出状态:正,反,关断,可直接用三个switch开关模拟,效果相同,实际的逆变器还需要考虑到死区时间、导通周期等问题,需要考虑的问题篇幅过大,在此不做赘述,逆变器部分再详解。在此只为验证计时器比较法的SVPWM输出的正确性:
逆变器的原理即是数字控制信号通过控制6个IGBT的关断,控制UVW三相输出状态:正,反,关断,可直接用三个switch开关模拟,效果相同,实际的逆变器还需要考虑到死区时间、导通周期等问题,需要考虑的问题篇幅过大,在此不做赘述,逆变器部分再详解。在此只为验证计时器比较法的SVPWM输出的正确性:
下面为输出观测模块:

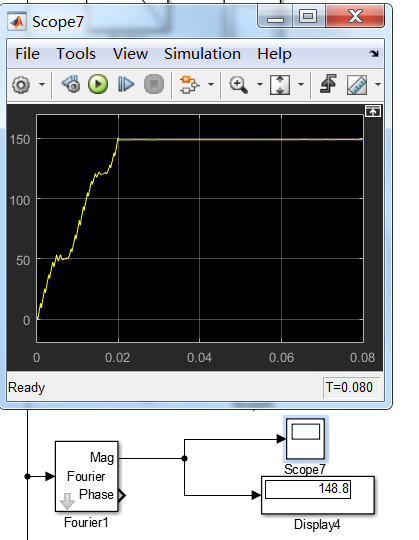
傅里叶模块输出的波形: 这里傅里叶模块用于观测幅值,可以看到幅值在起动的短时间内相电压可以达到理论值148.8并保持稳定,接近150V输入。
可观测到,scope6的显示为:

scope6前有4个低通滤波器,过滤谐波用,从上到下低通滤波器的作用分别为:只通过基波、过滤掉3次谐波以上的谐波、过滤5次谐波以上的谐波、过滤7次谐波以上的谐波,滤波器在软硬件设计中都是一门大学问,在此亦暂不做赘述。 低通滤波器配置: 说明一下,下图是保留基波的配置,若要过滤3次谐波以上的谐波,只需修改成314*3即可。5次7次同理。

从逆变器输出波形可以看出: 一、滤波后,基波已经可以输出较标准的正弦波形。 二、3次谐波的含量较高。 三、波形在一个周期后即达到理想状态。(实际中由于EMC、气隙磁场畸变等原因不会这么理想) 可以看出此SVPWM算法是正确可行的。
注: 1.SVPWM只是电机控制中很基础的一环,控制信号、反馈、park、clark变换等等软件处理在实际应用中均有难度,特别是滤波,电磁兼容的问题,足够想到脱发。因此只在matlab上做个仿真,输输波形跑跑电机是非常轻松愉悦的事。 2.实际要在simulink中搭建更接近真实控制电路控制流程的模型还缺几个模块,会在后续补充,这里只说明SVPWM的生成。 3.目前主流的还是FOC和DTC一类的控制算法,以及无传感器控制的均会陆续更新。 4.CSDN的编辑器很不人性化,后续可能直接分享我的印象笔记,排版实在费时。 5.相关模型文件我已经上传到CSDN,可下载。