{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 HDU_Kingso 的文章《C6748_PWM_ECAP学习》','https://www.xiaopingtou.net/article-81986.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
主函数

(手册P23)

(指南P171)
PSCModuleControl函数如下:
(指南P163)
(指南P186)
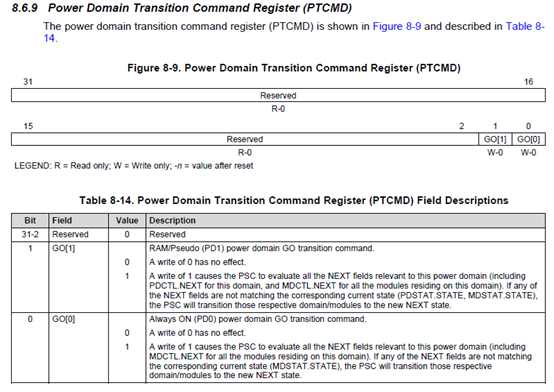
然后该函数HWREG(baseAdd + PSC_PTCMD) = PSC_PTCMD_GO0;句设置PTCMD寄存器的GO[0]位为1,UART1的power domain为0(PD0,见上P163图),从而将UART1状态切换到使能状态。

(指南P171)

(指南P176)
函数段
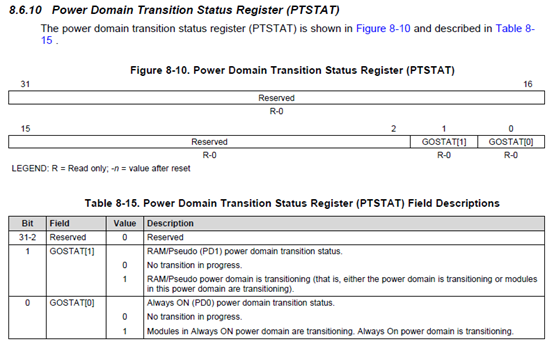
do {status = HWREG(baseAdd + PSC_PTSTAT) & PSC_PTSTAT_GOSTAT0;}
while (status && timeout–);等待UART1模块状态切换完成,如果没有切换,则status为0,程序继续向下运行。
(指南P171)

(指南P177)
函数段
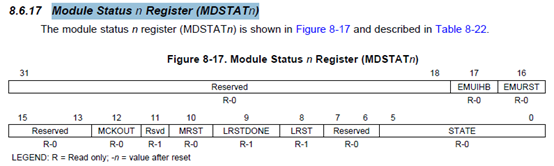
do {timeout–;}
while(timeout &&(HWREG(baseAdd + PSC_MDSTAT(moduleId)) & PSC_MDSTAT_STATE) != status);
等待UART1模块当前状态与使能状态一致。

(指南P171)
(指南P184)

(指南P184)
使能UART2模块之后,就要使能UART2模块的功能引脚了。UARTPinMuxSetup(2, FALSE);将UART2的tx和rx脚所在的芯片引脚的功能设置为UART2的TX脚和RX脚。UARTPinMuxSetup函数为创龙开发板特有的配置函数,该函数位于starterware/application/platform目录工程中的UART.C文件里。
该函数对系统配置模块0(System Configuration Module 0,SYSCFG0)的引脚复用控制寄存器4(Pin Multiplexing Control 4 Register,PINMUX4,地址值为0x01C1 4130h)进行设置,将GP1[0]脚功能设置为UART1_TXD,该脚作为UART1的发送脚,将GP1[1]脚功能设置为UART1_RXD,该脚作为UART1的接收脚。

(指南P204)

(指南P225)
(指南P225)
(指南P226)
UARTStdioInitExpClk函数如下:
(手册P23)

(指南P1430)

(指南P1447)
到这里,完成串口终端的初始化。
int main(void)
{
// 外设使能配置
PSCInit();
// 初始化串口终端 使用串口2
UARTStdioInit();
// GPIO 管脚复用配置
GPIOBankPinMuxSet();
// DSP 中断初始化
InterruptInit();
// PWM 中断初始化
PWMInterruptInit();
unsigned char i;
unsigned int j;
UARTPuts("Tronlong PWM_ECAP Application......
", -1);
UARTPuts("------------------------------------------------------------
", -1);
UARTPuts(" C6748 PWM Test
", -1);
// 产生波形
PWM1ABasic(25000,50);
UARTPuts(" C6748 PWM Test Over!
",-1);
UARTPuts("------------------------------------------------------------
", -1);
UARTPuts("------------------------------------------------------------
", -1);
UARTPuts(" C6748 ECAP Test
", -1);
// ECAP 捕获初始化
ECAPInit();
UARTPuts("Initialize ECAP.......
",-1);
for(i=0;i<5;i++)
{
for(j=0x00FFFFFF;j>0;j--); // 延时
ECAPRead();
}
UARTPuts("
",-1);
UARTPuts(" C6748 ECAP Test Over!
",-1);
UARTPuts("------------------------------------------------------------
", -1);
// 主循环
for(;;)
{
}
}
此程序的作用是实现eCAP(增强型捕获模块)的输入捕获功能,将ECAP2_APWM2设置为输入捕获模式,检测由EPWM1_A管脚输出的方波频率。将EPWMN0_TZ[0](ECAP2_APWM2和EPWMN0_TZ[0]引脚功能复用)和EPWM1_A短接,即可看到串口输出EPWMN0_TZ[0]脚所捕获到的EPWM1_A引脚输入的方波频率信息。
串口初始化
void UARTStdioInit(void)
{
UARTConsoleInit();
}
UARTStdioInit(void)位置在demoStarterWareSourceStarterWareUtils路径下工程文件里的uartStdio.c程序中,该函数又调用了UARTConsoleInit函数,UARTConsoleInit函数为创龙特有程序,函数在Platform工程下的UARTConsole.c文件里,该函数初始化串口控制台,函数如下:
void UARTConsoleInit(void)
{
#if (0 == UART_STDIO_INSTANCE)
{
PSCModuleControl(SOC_PSC_0_REGS,9, 0, PSC_MDCTL_NEXT_ENABLE);
UARTPinMuxSetup(0, FALSE);
}
#elif (1 == UART_STDIO_INSTANCE)
{
PSCModuleControl(SOC_PSC_1_REGS,12, 0, PSC_MDCTL_NEXT_ENABLE);
UARTPinMuxSetup(1, FALSE);
}
#else
{
PSCModuleControl(SOC_PSC_1_REGS,13, 0, PSC_MDCTL_NEXT_ENABLE);
UARTPinMuxSetup(2, FALSE); //将对应的芯片引脚的功能设置为UART2的TX脚和RX脚
}
#endif
UARTStdioInitExpClk(BAUD_115200, UART_RX_TRIG_LEVEL_1);
}
PSCModuleControl(SOC_PSC_1_REGS,13, 0, PSC_MDCTL_NEXT_ENABLE);函数对电源和睡眠控制器1(Power and Sleep Controller 1 (PSC1))进行设置
(手册P23)
(指南P171)
PSCModuleControl函数如下:
int PSCModuleControl (unsigned int baseAdd, unsigned int moduleId,
unsigned int powerDomain, unsigned int flags)
{
volatile unsigned int timeout = 0xFFFFFF;
int retVal = 0;
unsigned int status = 0;
HWREG(baseAdd + PSC_MDCTL(moduleId)) = (flags & PSC_MDCTL_NEXT);
if (powerDomain == 0)
{
HWREG(baseAdd + PSC_PTCMD) = PSC_PTCMD_GO0;
}
else
{
HWREG(baseAdd + PSC_PTCMD) = PSC_PTCMD_GO1;
}
if (powerDomain == 0)
{
do {
status = HWREG(baseAdd + PSC_PTSTAT) & PSC_PTSTAT_GOSTAT0;
} while (status && timeout--);
}
else
{
do {
status = HWREG(baseAdd + PSC_PTSTAT) & PSC_PTSTAT_GOSTAT1;
} while (status && timeout--);
}
if (timeout != 0)
{
timeout = 0xFFFFFF;
status = flags & PSC_MDCTL_NEXT;
do {
timeout--;
} while(timeout &&
(HWREG(baseAdd + PSC_MDSTAT(moduleId)) & PSC_MDSTAT_STATE) != status);
}
if (timeout == 0)
{
retVal = -1;
}
return retVal;
}
UART1的LPSC号(local PSC number)为12,对应的LPSC模块控制寄存器为MDCTL12.该函数设置MDCTL12寄存器(PSC1 Module Control n Register (modules 0-31) (MDCTLn))的NEXT字段为3,设置UART1下一状态为使能态,使能UART1模块。(指南P163)
(指南P186)
然后该函数HWREG(baseAdd + PSC_PTCMD) = PSC_PTCMD_GO0;句设置PTCMD寄存器的GO[0]位为1,UART1的power domain为0(PD0,见上P163图),从而将UART1状态切换到使能状态。
(指南P171)
(指南P176)
函数段
do {status = HWREG(baseAdd + PSC_PTSTAT) & PSC_PTSTAT_GOSTAT0;}
while (status && timeout–);等待UART1模块状态切换完成,如果没有切换,则status为0,程序继续向下运行。
(指南P171)
(指南P177)
函数段
do {timeout–;}
while(timeout &&(HWREG(baseAdd + PSC_MDSTAT(moduleId)) & PSC_MDSTAT_STATE) != status);
等待UART1模块当前状态与使能状态一致。
(指南P171)
(指南P184)
(指南P184)
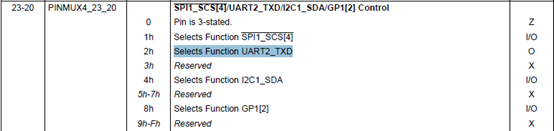
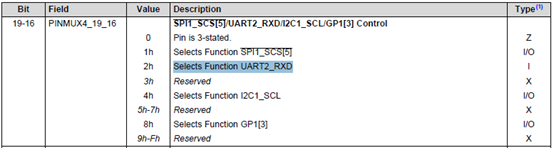
使能UART2模块之后,就要使能UART2模块的功能引脚了。UARTPinMuxSetup(2, FALSE);将UART2的tx和rx脚所在的芯片引脚的功能设置为UART2的TX脚和RX脚。UARTPinMuxSetup函数为创龙开发板特有的配置函数,该函数位于starterware/application/platform目录工程中的UART.C文件里。
该函数对系统配置模块0(System Configuration Module 0,SYSCFG0)的引脚复用控制寄存器4(Pin Multiplexing Control 4 Register,PINMUX4,地址值为0x01C1 4130h)进行设置,将GP1[0]脚功能设置为UART1_TXD,该脚作为UART1的发送脚,将GP1[1]脚功能设置为UART1_RXD,该脚作为UART1的接收脚。
(指南P204)
(指南P225)
(指南P225)
(指南P226)
void UARTPinMuxSetup(unsigned int instanceNum, unsigned int modemCtrlChoice)
{
unsigned int svPinMuxRtsCts = 0;
unsigned int svPinMuxTxdRxd = 0;
if(0 == instanceNum)
{
if(TRUE == modemCtrlChoice)
{
svPinMuxRtsCts = (HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(3)) &
~(SYSCFG_PINMUX3_PINMUX3_27_24 |
SYSCFG_PINMUX3_PINMUX3_31_28));
HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(3)) =
(PINMUX3_UART0_CTS_ENABLE |
PINMUX3_UART0_RTS_ENABLE |
svPinMuxRtsCts);
}
svPinMuxTxdRxd = (HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(3)) &
~(SYSCFG_PINMUX3_PINMUX3_23_20 |
SYSCFG_PINMUX3_PINMUX3_19_16));
HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(3)) =
(PINMUX3_UART0_TXD_ENABLE |
PINMUX3_UART0_RXD_ENABLE |
svPinMuxTxdRxd);
}
else if(1 == instanceNum)
{
if(TRUE == modemCtrlChoice)
{
svPinMuxRtsCts = (HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(0)) &
~(SYSCFG_PINMUX0_PINMUX0_23_20 |
SYSCFG_PINMUX0_PINMUX0_19_16));
HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(0)) =
(PINMUX0_UART1_CTS_ENABLE |
PINMUX0_UART1_RTS_ENABLE |
svPinMuxRtsCts);
}
svPinMuxTxdRxd = (HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(4)) &
~(SYSCFG_PINMUX4_PINMUX4_31_28 |
SYSCFG_PINMUX4_PINMUX4_27_24));
HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(4)) =
(PINMUX4_UART1_TXD_ENABLE |
PINMUX4_UART1_RXD_ENABLE |
svPinMuxTxdRxd);
}
else if(2 == instanceNum)
{
if(TRUE == modemCtrlChoice)
{
svPinMuxRtsCts = (HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(0)) &
~(SYSCFG_PINMUX0_PINMUX0_31_28 |
SYSCFG_PINMUX0_PINMUX0_27_24));
HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(0)) =
(PINMUX0_UART2_CTS_ENABLE |
PINMUX0_UART2_RTS_ENABLE |
svPinMuxRtsCts);
}
svPinMuxTxdRxd = (HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(4)) &
~(SYSCFG_PINMUX4_PINMUX4_23_20 |
SYSCFG_PINMUX4_PINMUX4_19_16));
HWREG(SOC_SYSCFG_0_REGS + SYSCFG0_PINMUX(4)) =
(PINMUX4_UART2_TXD_ENABLE |
PINMUX4_UART2_RXD_ENABLE |
svPinMuxTxdRxd);
}
else
{
}
}
UARTStdioInitExpClk(BAUD_115200, UART_RX_TRIG_LEVEL_1);函数设置串口参数为8数据位,1停止位,无校验,并使能发送和接收fifo,接收fifo的触发水平为1,即接收fifo每收到1个字节,立刻产生一个Receiver data ready中断,通知CPU进行处理。UARTStdioInitExpClk函数如下:
static void UARTStdioInitExpClk(unsigned int baudRate, unsigned int rxTrigLevel)
{
// 使能接收 / 发送
UARTEnable(UART_CONSOLE_BASE);
// 串口参数配置
// 8位数据位 1位停止位 无校验
UARTConfigSetExpClk(UART_CONSOLE_BASE,
SOC_UART_1_MODULE_FREQ,
baudRate,
UART_WORDL_8BITS,
UART_OVER_SAMP_RATE_16);
// 使能接收 / 发送 FIFO
UARTFIFOEnable(UART_CONSOLE_BASE);
// 设置接收 FIFO 级别
UARTFIFOLevelSet(UART_CONSOLE_BASE, rxTrigLevel);
}
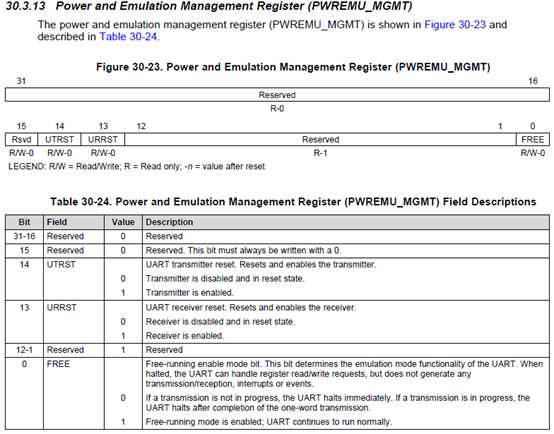
函数设置UART1的PWREMU_MGMT寄存器的FREE、UTSRT、URRST3位,使能UART的free运行模式,UART将会正常运行,并使能UART的transmitter和receiver。(手册P23)
(指南P1430)
(指南P1447)
到这里,完成串口终端的初始化。