{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 STM32F103_2018 的文章《Matlab/Simulink 自动代码生成 基于模型设计学习教程(12)---- PID控制直流电》','https://www.xiaopingtou.net/article-82715.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
基于前面的基础,我们已经能够搭建Simulink上位机、编码器测速、IIR滤波。这个利用PID控制直流电机实验,我们能否把这些功能都结合起来,形成一个综合性比较强的实验呢;
下面我们给本实验提一点设计需求:
 直流电机控制正反转只需要切换控制端的两个电平高低,那么上述模型就根据上位机的信号切换电平高低
我们再来看一下PID控制器模型
直流电机控制正反转只需要切换控制端的两个电平高低,那么上述模型就根据上位机的信号切换电平高低
我们再来看一下PID控制器模型
 积分模型和微分模型都要选取离散型的,根据速度误差经过PID后控制PWM的占空比实现调速的效果
对于MCU跟Simulink之间的通讯我们采用串口通讯方式
对于测速模型跟数据滤波模型前面已经讲过了,在这就不要继续重复了
为了显示模型运行正常,我们加一个闪烁灯,以表示程序运行正常
下图是PID控制直流电机的整个模型
积分模型和微分模型都要选取离散型的,根据速度误差经过PID后控制PWM的占空比实现调速的效果
对于MCU跟Simulink之间的通讯我们采用串口通讯方式
对于测速模型跟数据滤波模型前面已经讲过了,在这就不要继续重复了
为了显示模型运行正常,我们加一个闪烁灯,以表示程序运行正常
下图是PID控制直流电机的整个模型
 下图是PID控制直流电机的Simulink上位机
下图是PID控制直流电机的Simulink上位机
 到此,设计阶段所提的需求基本已经解决了,下面我们实际去检测一下它的效果;
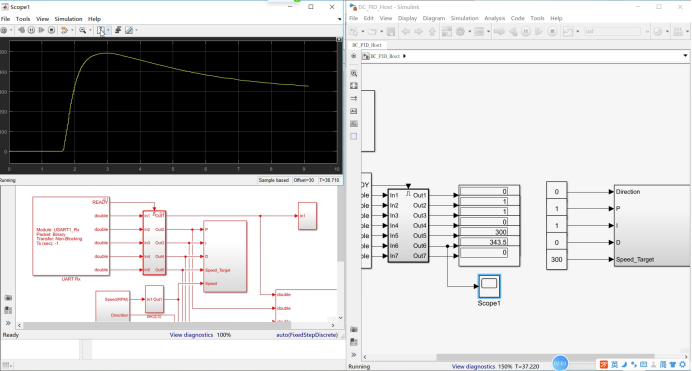
在目标速度为300的情况下,P值为1、I值为、D值为0的情况下进行直流电机的速度调节,我们可以看到速度非常快就由0接近目标速度300
到此,设计阶段所提的需求基本已经解决了,下面我们实际去检测一下它的效果;
在目标速度为300的情况下,P值为1、I值为、D值为0的情况下进行直流电机的速度调节,我们可以看到速度非常快就由0接近目标速度300
 在更改目标速度的情况下,目标速度由300改成400,响应速度是非常快的
在更改目标速度的情况下,目标速度由300改成400,响应速度是非常快的
 目标速度由400改成300,我们可以观测波形,响应速度是非常快了的,但是波形震荡还是挺大的,我们把这种波形更加平滑,这就要求我们修改PID的参数了;
目标速度由400改成300,我们可以观测波形,响应速度是非常快了的,但是波形震荡还是挺大的,我们把这种波形更加平滑,这就要求我们修改PID的参数了;
 把参数更改成3以后,我们可以看到出现了一些超调的现象,
把参数更改成3以后,我们可以看到出现了一些超调的现象,
 我们再把P值再增大到5,出现的超调现象会更加严重了;
我们再把P值再增大到5,出现的超调现象会更加严重了;
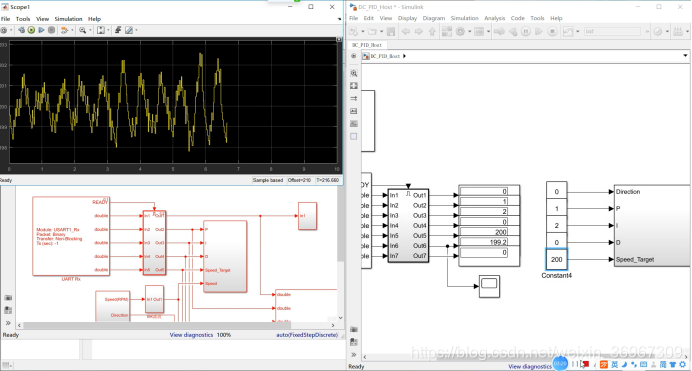
 我们把P值改成1,I值改成2,我们可以看到波形振荡的区间明显缩小,响应速度也加快了很多
我们把P值改成1,I值改成2,我们可以看到波形振荡的区间明显缩小,响应速度也加快了很多
 我们再把示波器放大,看看PID调速的精度,200的目标速度,误差基本在1左右;
我们再把示波器放大,看看PID调速的精度,200的目标速度,误差基本在1左右;
 如需进一步获得Matlab/Simulink 自动代码生成 基于模型设计学习教程的源代码包,请加QQ群:710443158
如需进一步获得Matlab/Simulink 自动代码生成 基于模型设计学习教程的源代码包,请加QQ群:710443158
- 利用上位机控制电机正反转;
- 利用上位机观测到电机的转速、转向,通过滤波算法提高测速的精度;
- 利用上位机调整PID三个参数,使能达到更好的控制效果;
- 利用上位机实时调整目标值,观测调整效果;
直流电机控制正反转只需要切换控制端的两个电平高低,那么上述模型就根据上位机的信号切换电平高低
我们再来看一下PID控制器模型
积分模型和微分模型都要选取离散型的,根据速度误差经过PID后控制PWM的占空比实现调速的效果
对于MCU跟Simulink之间的通讯我们采用串口通讯方式
对于测速模型跟数据滤波模型前面已经讲过了,在这就不要继续重复了
为了显示模型运行正常,我们加一个闪烁灯,以表示程序运行正常
下图是PID控制直流电机的整个模型
下图是PID控制直流电机的Simulink上位机
到此,设计阶段所提的需求基本已经解决了,下面我们实际去检测一下它的效果;
在目标速度为300的情况下,P值为1、I值为、D值为0的情况下进行直流电机的速度调节,我们可以看到速度非常快就由0接近目标速度300
在更改目标速度的情况下,目标速度由300改成400,响应速度是非常快的
目标速度由400改成300,我们可以观测波形,响应速度是非常快了的,但是波形震荡还是挺大的,我们把这种波形更加平滑,这就要求我们修改PID的参数了;
把参数更改成3以后,我们可以看到出现了一些超调的现象,
我们再把P值再增大到5,出现的超调现象会更加严重了;
我们把P值改成1,I值改成2,我们可以看到波形振荡的区间明显缩小,响应速度也加快了很多
我们再把示波器放大,看看PID调速的精度,200的目标速度,误差基本在1左右;
如需进一步获得Matlab/Simulink 自动代码生成 基于模型设计学习教程的源代码包,请加QQ群:710443158