{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 andy_james 的文章《Qualcomm android camera 架构简析及如何debug》','https://www.xiaopingtou.net/article-83244.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
0条评论
Qualcomm android camera 架构简析及如何debug
一. Camera模组(CCM)介绍: CCM一般包含四大件: 镜头(lens)、传感器(sensor)、软板(FPC)、图像处理芯片(DSP): Camera的成像原理可以简单概括如下:
Camera的成像原理可以简单概括如下:

1、CCD/CMOS将被摄体的光信号转变为电信号—电子图像(模拟信号)
2、由模/数转换器(ADC)芯片来将模拟信号转化为数字信号
3、数字信号形成后,由DSP或编码库对信号进行压缩并转化为特定的图像文件格式储存 4. 送到cpu中处理并display。
二. 电路图
 1. 电源
--dvdd,iovdd,avdd。
2. I2c
由于I2C接口采用OpenDrain机制,器件本身只能输出低电平,无法主动输出高电平,只能通过外部上拉电阻RP将信号线拉至高电平。因此I2C总线上必须有上拉电阻!
阻值:I2C的上拉电阻可以是1.5K,2.2K,4.7K, 电阻的大小对时序有一定影响,对信号的上升时间和下降时间也有影响,一般接1.5K或2.2K。不能低于1k。高于10k。
过小的话灌入端口的电流变大,低电平变高。过大上升平缓。
通产情况下,SDA,SCL两条线上的上拉电阻取值是一致的,并上拉到同一电源上。
在I2c总线可以串连300欧姆电阻RS可以用于防止SDA和SCL线的高电压毛刺.
3. Mipi
而DDR是一个时钟周期内传输两次次数据,它能够在时钟的上升期和下降期各传输一次数据,因此称为双倍速率同步动态随机存储器
MIPI的通道模式和线上电平。在正常的操作模式下,数据通道处于高速模式或者控制模式。在高速模式下,通道状态是差分的0或者1,也就是线对内P比N高时,定义为1,P比N低时,定义为0,高低速分别200MV,1.2V.
控制模式:LP11,LP10,LP01,LP00四个状态;MIPI协议规定控制模式4个不同状态组成的不同时序代表着将要进入或者退出高速模式等;比如LP11-LP01-LP00序列后,进入高速模式。下图为线上电平的图示
MIN [ Settle count * T(Timer clock)] > T(HS_SETTLE)_MIN
MAX [ Settle count * T(Timer clock)] < T(HS-PREPARE)+T(HS_ZERO) - 4*T(Timer clock)
1. 电源
--dvdd,iovdd,avdd。
2. I2c
由于I2C接口采用OpenDrain机制,器件本身只能输出低电平,无法主动输出高电平,只能通过外部上拉电阻RP将信号线拉至高电平。因此I2C总线上必须有上拉电阻!
阻值:I2C的上拉电阻可以是1.5K,2.2K,4.7K, 电阻的大小对时序有一定影响,对信号的上升时间和下降时间也有影响,一般接1.5K或2.2K。不能低于1k。高于10k。
过小的话灌入端口的电流变大,低电平变高。过大上升平缓。
通产情况下,SDA,SCL两条线上的上拉电阻取值是一致的,并上拉到同一电源上。
在I2c总线可以串连300欧姆电阻RS可以用于防止SDA和SCL线的高电压毛刺.
3. Mipi
而DDR是一个时钟周期内传输两次次数据,它能够在时钟的上升期和下降期各传输一次数据,因此称为双倍速率同步动态随机存储器
MIPI的通道模式和线上电平。在正常的操作模式下,数据通道处于高速模式或者控制模式。在高速模式下,通道状态是差分的0或者1,也就是线对内P比N高时,定义为1,P比N低时,定义为0,高低速分别200MV,1.2V.
控制模式:LP11,LP10,LP01,LP00四个状态;MIPI协议规定控制模式4个不同状态组成的不同时序代表着将要进入或者退出高速模式等;比如LP11-LP01-LP00序列后,进入高速模式。下图为线上电平的图示
MIN [ Settle count * T(Timer clock)] > T(HS_SETTLE)_MIN
MAX [ Settle count * T(Timer clock)] < T(HS-PREPARE)+T(HS_ZERO) - 4*T(Timer clock)
 三.AndroidCamera框架简析
三.AndroidCamera框架简析
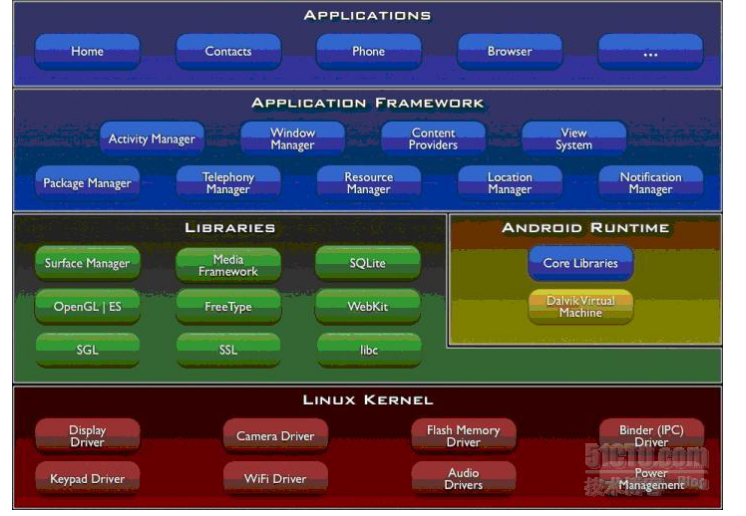 从Android框架看,分为四层:应用层、应用框架层、库层、内核层。
库层是Android与底层硬件通信接口,它封装底层硬件接口实现该模块的具体逻辑,并以服务的形式通过Binder通讯机制暴露给应用框架
1.camera应用层
2.Framework.Camera client/service
3.硬件抽象层HAL Hardware Abstraction Layer
从Android框架看,分为四层:应用层、应用框架层、库层、内核层。
库层是Android与底层硬件通信接口,它封装底层硬件接口实现该模块的具体逻辑,并以服务的形式通过Binder通讯机制暴露给应用框架
1.camera应用层
2.Framework.Camera client/service
3.硬件抽象层HAL Hardware Abstraction Layer


1.1、camera应用层 Camera 的应用层在Android 上表现为直接调用SDK API 开发的一个Camera 应用APK 包。主要对 android.hardware.Camera(在Framework中) 类的调用,并且实现Camera 应用的业务逻辑和UI 显示。 使用这个android.hardware.Camera类,需要在Manifest 文件声明Camera 的权限,另外还 需要添加一些 元素来声明应用中的Camera 特性。
onCreate 调用setModuleFromIndex 方法,赋值 mCurrentModule = new PhotoModule();
mCameraDevice = CameraUtil.openCamera(
mActivity, mCameraId, mHandler,
mActivity.getCameraOpenErrorCallback())
其中mCameraDevice是com.android.camera.CameraManager.CameraProxy;的实例。
CameraUtil属于公共的API,用于给不同模块提供对Camera的不同操作。
在它openCamera 方法里,执行:
CameraHolder.instance().open(handler, cameraId, cb);
其中CameraHolder.instance()单例模式。目的就是控制,相机开启的只有能是一个。再次开启前,要确认上次已经销毁。
b、 在CameraManager系统服务,获得camera设备对象为Camera设备提供操作的方法。 public CameraProxy cameraOpen(
Handler handler, int cameraId, CameraOpenErrorCallback callback); CameraProxy 里AndroidCameraProxyImpl类这个接口就是将对Camera 接受和发送的操作,送达到Camera设备。 这个接口的实现类是AndroidCameraProxyImpl,这个类属于AndroidCameraManagerImpl的内部类。在AndroidCameraManagerImpl.java 里面还有一个内部类CameraHandler,这个类属于Handler。在CameraHandler的handleMessage方法里,就是根据不同的消息参数来对android.hardware.Camera 进行控制。比如打开,释放,对焦,变焦等等
c. jni 应用里通过CameraProxy对象发送消息给CameraHandler处理,CameraHandler通过android.hardware.Camera的接口去调用JNI层的方法,Camera JNI实现在android_hardware_Camera.cpp里 d. Camerahal Camera HAL层的接口是通过CameraHardwareInterface类的各个方法给framework调用, CameraHardwareInterface对象在CameraClient里实现,并且CameraClient封装了Camera硬件的各个操作的接口. Camera.cpp里的每一个Camera的操作方法最后都调用ICamera接口里定义的方法,这个接口被BpCamera继承,BpCamera是binder机制的标准使用方法,他对应的调用类就是BnCamera. e. 为了实现一个具体功能的Camera,在最底层还需要一个硬件相关的Camere 驱动库(例如通过调用video for linux 驱动程序和Jpeg 编码程序实现)。这个库将被Camera 的服务库libcameraservice.so 调用。 f.Camera内核code Driver,csid,csiphy..
Probe:Server.c->main
四.Camera debug:
Sensor log: adb shell setprop persist.camera.hal.debug.mask 536870919 HAL/mm-camera-interface/mm-jpeg-interface CDBG_HIGH() 和CDBG() log都会被打印. CDBG_ERROR() log总是被打印 0-27位决定打印模块(目前只有三个模块): §Bit0: HAL (hardware/qcom/camera/QCamera2/HAL) §Bit1: mm-camera-interface (hardware/qcom/camera/QCamera2/stack/mm-camera-interface) §Bit2: mm-jpeg-interface (hardware/qcom/camera/QCamera2/stack/mm-jpeg-interface) adb shell setprop persist.camera.sensor.debug 3 § SERR(), SHIGH()和SLOW() log会被打印 adb shell setprop persist.camera.imglib.logs 4 § IDBG_ERROR(), IDBG_HIGH() , IDBG_MED(), IDBG_LOW()都会被打印 adb shell setprop persist.camera.pproc.debug.mask 805306375 §805306375 = 0x30000007, 表示PPROC/C2D/CPP模块CDBG_HIGH(), CDBG(), CDBG_LOW() 都会被打印. Bit0: PPROC (mm-camera2/media-controller/modules/pproc-new) §Bit1: C2D (mm-camera2/media-controller/modules/pproc-new/c2d) §Bit2: CPP (mm-camera2/media-controller/modules/pproc-new/cpp) adb shell setprop persist.camera.mct.debug.mask 536870913 §536870913 = 0x20000001, 表示MCT CDBG_HIGH(), CDBG() 都会被打印. 0-27位决定打印模块(目前只一个模块): §Bit0: PPROC (mm-camera2/media-controller/mct) adb shell setprop persist.camera.ISP.debug.mask 16777217 §16777217 = 0x1000001, 打开ISP_MOD_COM. ISP_MOD_LINEARIZATIO log Bit 0: ISP_MOD_LINEARIZATION Bit 1: ISP_MOD_ROLLOFF Bit 2: ISP_MOD_DEMUX Bit 3: ISP_MOD_DEMOSAIC Bit 4: ISP_MOD_BPC Bit 5: ISP_MOD_ABF Bit 6: ISP_MOD_ASF Bit 7: ISP_MOD_COLOR_CONV Bit 8: ISP_MOD_COLOR_CORRECT Bit 9: ISP_MOD_CHROMA_SS Bit 10: ISP_MOD_CHROMA_SUPPRESS Bit 11: ISP_MOD_LA Bit 12: ISP_MOD_MCE Bit 13: ISP_MOD_SCE Bit 14: ISP_MOD_CLF Bit 15: ISP_MOD_WB Bit 16: ISP_MOD_GAMMA Bit 17: ISP_MOD_FOV Bit 18: ISP_MOD_SCALER Bit 19: ISP_MOD_BCC Bit 20: ISP_MOD_CLAMP Bit 21: ISP_MOD_FRAME_SKIP Bit 22: ISP_MOD_STATS Bit 23: ISP_MOD_COLOR_XFORM Bit 24: ISP_MOD_COM adb shell setprop persist.camera.stats.debug.mask 7 §7 = 0b111, 打开AEC/AWB/AF log Bit 0: STATS_DEBUG_MASK_AEC_LOG Bit 1: STATS_DEBUG_MASK_AWB_LOG Bit 2: STATS_DEBUG_MASK_AF_LOG Bit 3: STATS_DEBUG_MASK_ASD_LOG Bit 4: STATS_DEBUG_MASK_AFD_LOG MSM8916 Android 5.0 Camera log -HAL adb shell setprop persist.camera.hal.debug 2 §表示HAL/mm-camera-interface/mm-jpeg-interfaceCDBG_HIGH() 和CDBG() log都会被打印. CDBG_ERROR() log总是被打印 adb shell setprop persist.camera.sensor.debug 2 §表示sensor module (mm-camera2/media-controller/modules/sensors)SERR() , SHIGH() 和SLOW() log都会被打印. CPP-log 没有动态开关,需要修改mm-camera2/media-controller/modules/pproc-new/cpp/cpp_log.h里面定义的CPP_LOG_VERBOSE后重新编译 §CPP_LOG_VERBOSE = 0,只有CPP_ERR() log被打印 §CPP_LOG_VERBOSE = 1,CPP_ERR(), CPP_HIGH() log被打印 §CPP_LOG_VERBOSE = 2,CPP_ERR(), CPP_HIGH(), CPP_DBG() log被打印 §CPP_LOG_VERBOSE = 3,CPP_ERR(), CPP_HIGH(), CPP_DBG() , CPP_LOW() log都被打印 §默认CPP_LOG_VERBOSE = 1 adb shell setprop persist.camera.mct.debug 2 §表示MCT(mm-camera2/media-controller/mct)CDBG_ERROR(), CDBG_HIGH(), CDBG() 都会被打印 adb shell setprop persist.camera.stats.debug 2 §打开AEC ERR/HIGH/LOW log, 即AEC_ERR()/AEC_HIGH()/AEC_LOW() log会被打印 Bit 0-1: STATS_DEBUG_MASK_AEC_LOG §Bit 2-3: STATS_DEBUG_MASK_AWB_LOG §Bit 4-5: STATS_DEBUG_MASK_AF_LOG §Bit 6-7: STATS_DEBUG_MASK_ASD_LOG §Bit 8-9: STATS_DEBUG_MASK_AFD_LOG §Bit 10-11: STATS_DEBUG_MASK_Q3A_LOG §Bit 12-13: STATS_DEBUG_MASK_STATS_LOG §Bit 14-15: STATS_DEBUG_MASK_IS_LOG adb shell setprop persist.camera.global.debug 2 §表示HAL/Sensor/MCT/3A 所有ERROR/HIGH/LOW log都会被打印 Kernel log: Sensor bring up and 常见问题的分析: 如果有高通lisence的同学也可以看看下面文档
参考文档: 80-NU323-2SC_D_Multimedia_Driver_Development_and_Bringup_Guide_-_Camera_Simplified_Chinese.pdf 80-NL239-33SC_D_Linux_Camera_Debugging_Guide_Simplified_Chinese.pdf 80-ND717-2BX_MSM8X10-MSM8X12_SOFTWARE_INTERFACE_FOR_OEMS.pdf
一. Camera模组(CCM)介绍: CCM一般包含四大件: 镜头(lens)、传感器(sensor)、软板(FPC)、图像处理芯片(DSP):
Camera的成像原理可以简单概括如下:
1、CCD/CMOS将被摄体的光信号转变为电信号—电子图像(模拟信号)
2、由模/数转换器(ADC)芯片来将模拟信号转化为数字信号
3、数字信号形成后,由DSP或编码库对信号进行压缩并转化为特定的图像文件格式储存 4. 送到cpu中处理并display。
二. 电路图
1. 电源
--dvdd,iovdd,avdd。
2. I2c
由于I2C接口采用OpenDrain机制,器件本身只能输出低电平,无法主动输出高电平,只能通过外部上拉电阻RP将信号线拉至高电平。因此I2C总线上必须有上拉电阻!
阻值:I2C的上拉电阻可以是1.5K,2.2K,4.7K, 电阻的大小对时序有一定影响,对信号的上升时间和下降时间也有影响,一般接1.5K或2.2K。不能低于1k。高于10k。
过小的话灌入端口的电流变大,低电平变高。过大上升平缓。
通产情况下,SDA,SCL两条线上的上拉电阻取值是一致的,并上拉到同一电源上。
在I2c总线可以串连300欧姆电阻RS可以用于防止SDA和SCL线的高电压毛刺.
3. Mipi
而DDR是一个时钟周期内传输两次次数据,它能够在时钟的上升期和下降期各传输一次数据,因此称为双倍速率同步动态随机存储器
MIPI的通道模式和线上电平。在正常的操作模式下,数据通道处于高速模式或者控制模式。在高速模式下,通道状态是差分的0或者1,也就是线对内P比N高时,定义为1,P比N低时,定义为0,高低速分别200MV,1.2V.
控制模式:LP11,LP10,LP01,LP00四个状态;MIPI协议规定控制模式4个不同状态组成的不同时序代表着将要进入或者退出高速模式等;比如LP11-LP01-LP00序列后,进入高速模式。下图为线上电平的图示
MIN [ Settle count * T(Timer clock)] > T(HS_SETTLE)_MIN
MAX [ Settle count * T(Timer clock)] < T(HS-PREPARE)+T(HS_ZERO) - 4*T(Timer clock)
三.AndroidCamera框架简析
从Android框架看,分为四层:应用层、应用框架层、库层、内核层。
库层是Android与底层硬件通信接口,它封装底层硬件接口实现该模块的具体逻辑,并以服务的形式通过Binder通讯机制暴露给应用框架
1.camera应用层
2.Framework.Camera client/service
3.硬件抽象层HAL Hardware Abstraction Layer
1.1、camera应用层 Camera 的应用层在Android 上表现为直接调用SDK API 开发的一个Camera 应用APK 包。主要对 android.hardware.Camera(在Framework中) 类的调用,并且实现Camera 应用的业务逻辑和UI 显示。 使用这个android.hardware.Camera类,需要在Manifest 文件声明Camera 的权限,另外还 需要添加一些
onCreate 调用setModuleFromIndex 方法,赋值 mCurrentModule = new PhotoModule();
mCameraDevice = CameraUtil.openCamera(
mActivity, mCameraId, mHandler,
mActivity.getCameraOpenErrorCallback())
其中mCameraDevice是com.android.camera.CameraManager.CameraProxy;的实例。
CameraUtil属于公共的API,用于给不同模块提供对Camera的不同操作。
在它openCamera 方法里,执行:
CameraHolder.instance().open(handler, cameraId, cb);
其中CameraHolder.instance()单例模式。目的就是控制,相机开启的只有能是一个。再次开启前,要确认上次已经销毁。
b、 在CameraManager系统服务,获得camera设备对象为Camera设备提供操作的方法。 public CameraProxy cameraOpen(
Handler handler, int cameraId, CameraOpenErrorCallback callback); CameraProxy 里AndroidCameraProxyImpl类这个接口就是将对Camera 接受和发送的操作,送达到Camera设备。 这个接口的实现类是AndroidCameraProxyImpl,这个类属于AndroidCameraManagerImpl的内部类。在AndroidCameraManagerImpl.java 里面还有一个内部类CameraHandler,这个类属于Handler。在CameraHandler的handleMessage方法里,就是根据不同的消息参数来对android.hardware.Camera 进行控制。比如打开,释放,对焦,变焦等等
c. jni 应用里通过CameraProxy对象发送消息给CameraHandler处理,CameraHandler通过android.hardware.Camera的接口去调用JNI层的方法,Camera JNI实现在android_hardware_Camera.cpp里 d. Camerahal Camera HAL层的接口是通过CameraHardwareInterface类的各个方法给framework调用, CameraHardwareInterface对象在CameraClient里实现,并且CameraClient封装了Camera硬件的各个操作的接口. Camera.cpp里的每一个Camera的操作方法最后都调用ICamera接口里定义的方法,这个接口被BpCamera继承,BpCamera是binder机制的标准使用方法,他对应的调用类就是BnCamera. e. 为了实现一个具体功能的Camera,在最底层还需要一个硬件相关的Camere 驱动库(例如通过调用video for linux 驱动程序和Jpeg 编码程序实现)。这个库将被Camera 的服务库libcameraservice.so 调用。 f.Camera内核code Driver,csid,csiphy..
android启动和camera probe:
Probe:Server.c->main
四.Camera debug:
Sensor log: adb shell setprop persist.camera.hal.debug.mask 536870919 HAL/mm-camera-interface/mm-jpeg-interface CDBG_HIGH() 和CDBG() log都会被打印. CDBG_ERROR() log总是被打印 0-27位决定打印模块(目前只有三个模块): §Bit0: HAL (hardware/qcom/camera/QCamera2/HAL) §Bit1: mm-camera-interface (hardware/qcom/camera/QCamera2/stack/mm-camera-interface) §Bit2: mm-jpeg-interface (hardware/qcom/camera/QCamera2/stack/mm-jpeg-interface) adb shell setprop persist.camera.sensor.debug 3 § SERR(), SHIGH()和SLOW() log会被打印 adb shell setprop persist.camera.imglib.logs 4 § IDBG_ERROR(), IDBG_HIGH() , IDBG_MED(), IDBG_LOW()都会被打印 adb shell setprop persist.camera.pproc.debug.mask 805306375 §805306375 = 0x30000007, 表示PPROC/C2D/CPP模块CDBG_HIGH(), CDBG(), CDBG_LOW() 都会被打印. Bit0: PPROC (mm-camera2/media-controller/modules/pproc-new) §Bit1: C2D (mm-camera2/media-controller/modules/pproc-new/c2d) §Bit2: CPP (mm-camera2/media-controller/modules/pproc-new/cpp) adb shell setprop persist.camera.mct.debug.mask 536870913 §536870913 = 0x20000001, 表示MCT CDBG_HIGH(), CDBG() 都会被打印. 0-27位决定打印模块(目前只一个模块): §Bit0: PPROC (mm-camera2/media-controller/mct) adb shell setprop persist.camera.ISP.debug.mask 16777217 §16777217 = 0x1000001, 打开ISP_MOD_COM. ISP_MOD_LINEARIZATIO log Bit 0: ISP_MOD_LINEARIZATION Bit 1: ISP_MOD_ROLLOFF Bit 2: ISP_MOD_DEMUX Bit 3: ISP_MOD_DEMOSAIC Bit 4: ISP_MOD_BPC Bit 5: ISP_MOD_ABF Bit 6: ISP_MOD_ASF Bit 7: ISP_MOD_COLOR_CONV Bit 8: ISP_MOD_COLOR_CORRECT Bit 9: ISP_MOD_CHROMA_SS Bit 10: ISP_MOD_CHROMA_SUPPRESS Bit 11: ISP_MOD_LA Bit 12: ISP_MOD_MCE Bit 13: ISP_MOD_SCE Bit 14: ISP_MOD_CLF Bit 15: ISP_MOD_WB Bit 16: ISP_MOD_GAMMA Bit 17: ISP_MOD_FOV Bit 18: ISP_MOD_SCALER Bit 19: ISP_MOD_BCC Bit 20: ISP_MOD_CLAMP Bit 21: ISP_MOD_FRAME_SKIP Bit 22: ISP_MOD_STATS Bit 23: ISP_MOD_COLOR_XFORM Bit 24: ISP_MOD_COM adb shell setprop persist.camera.stats.debug.mask 7 §7 = 0b111, 打开AEC/AWB/AF log Bit 0: STATS_DEBUG_MASK_AEC_LOG Bit 1: STATS_DEBUG_MASK_AWB_LOG Bit 2: STATS_DEBUG_MASK_AF_LOG Bit 3: STATS_DEBUG_MASK_ASD_LOG Bit 4: STATS_DEBUG_MASK_AFD_LOG MSM8916 Android 5.0 Camera log -HAL adb shell setprop persist.camera.hal.debug 2 §表示HAL/mm-camera-interface/mm-jpeg-interfaceCDBG_HIGH() 和CDBG() log都会被打印. CDBG_ERROR() log总是被打印 adb shell setprop persist.camera.sensor.debug 2 §表示sensor module (mm-camera2/media-controller/modules/sensors)SERR() , SHIGH() 和SLOW() log都会被打印. CPP-log 没有动态开关,需要修改mm-camera2/media-controller/modules/pproc-new/cpp/cpp_log.h里面定义的CPP_LOG_VERBOSE后重新编译 §CPP_LOG_VERBOSE = 0,只有CPP_ERR() log被打印 §CPP_LOG_VERBOSE = 1,CPP_ERR(), CPP_HIGH() log被打印 §CPP_LOG_VERBOSE = 2,CPP_ERR(), CPP_HIGH(), CPP_DBG() log被打印 §CPP_LOG_VERBOSE = 3,CPP_ERR(), CPP_HIGH(), CPP_DBG() , CPP_LOW() log都被打印 §默认CPP_LOG_VERBOSE = 1 adb shell setprop persist.camera.mct.debug 2 §表示MCT(mm-camera2/media-controller/mct)CDBG_ERROR(), CDBG_HIGH(), CDBG() 都会被打印 adb shell setprop persist.camera.stats.debug 2 §打开AEC ERR/HIGH/LOW log, 即AEC_ERR()/AEC_HIGH()/AEC_LOW() log会被打印 Bit 0-1: STATS_DEBUG_MASK_AEC_LOG §Bit 2-3: STATS_DEBUG_MASK_AWB_LOG §Bit 4-5: STATS_DEBUG_MASK_AF_LOG §Bit 6-7: STATS_DEBUG_MASK_ASD_LOG §Bit 8-9: STATS_DEBUG_MASK_AFD_LOG §Bit 10-11: STATS_DEBUG_MASK_Q3A_LOG §Bit 12-13: STATS_DEBUG_MASK_STATS_LOG §Bit 14-15: STATS_DEBUG_MASK_IS_LOG adb shell setprop persist.camera.global.debug 2 §表示HAL/Sensor/MCT/3A 所有ERROR/HIGH/LOW log都会被打印 Kernel log: Sensor bring up and 常见问题的分析: 如果有高通lisence的同学也可以看看下面文档
参考文档: 80-NU323-2SC_D_Multimedia_Driver_Development_and_Bringup_Guide_-_Camera_Simplified_Chinese.pdf 80-NL239-33SC_D_Linux_Camera_Debugging_Guide_Simplified_Chinese.pdf 80-ND717-2BX_MSM8X10-MSM8X12_SOFTWARE_INTERFACE_FOR_OEMS.pdf