{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 aluowell 的文章《瑞芯微 RK3399 VR Android参数配置和调试说明》','https://www.xiaopingtou.net/article-84127.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
RK3399的CPU采用big.LITTLE大小核架构,双Cortex-A72大核+四Cortex-A53小核结构,对整数、浮点、内存等作了大幅优化,在整体性能、功耗及核心面积三个方面都具革命性提升。 RK3399的GPU采用四核ARM新一代高端图像处理器Mali-T860,集成更多带宽压缩技术:如智能迭加、ASTC、本地像素存储等,还支持更多的图形和计算接口,总体性能比上一代提升45%。
盈鹏飞科技最新研发的RK3399安卓主板,搭载了最新android7.1 系统,4G DDR3内存,32G EMMC 存诸等...RK3399开发板主板尺寸为:146*102mm,设计有非常丰富的接口,板载5路UART,支持USB3.0高性能设备接口, WIFI/BT二合一,HDMI OUT 、HDMI INT、Type C、4G、IR、以太网等;可扩展模块包括4G模块、Camera(1300万、500万)等应用类功能模块。
RK3399开发板为消费类电子、智能终端、MID、无线通讯、医疗设备、工业控制等行业产品的应用开发而设计,超强的视频处理能力,超高清视频输出优势,接口丰富、性能稳定。支持AndroidLinuxUbuntu系统,软件支持完善,开放源代码适合企业二次开发带高清显示的商显广告机、自助售货机、教育终端等,可降低研发门槛,缩短产品研发周期。

 RK3399 VR Android参数配置和调试说明
1 宏配置
RK3399 VR Android参数配置和调试说明
1 宏配置
 2 系统属性说明
以下提到的屏幕或显示默认都是指主显示,涉及次显的会具体指出。区分主显和副显(次
显)的方法是查看 kernel dts 配置中 vopb_rk_fb 和 vopl_rk_fb 节点的 rockchip,prop 值 为 PRMRY 还是 EXTEND,PRMRY 表示主显,EXTEND 表示次显。对于 VR 来说,目前内核以下三 个参考 dts:
2 系统属性说明
以下提到的屏幕或显示默认都是指主显示,涉及次显的会具体指出。区分主显和副显(次
显)的方法是查看 kernel dts 配置中 vopb_rk_fb 和 vopl_rk_fb 节点的 rockchip,prop 值 为 PRMRY 还是 EXTEND,PRMRY 表示主显,EXTEND 表示次显。对于 VR 来说,目前内核以下三 个参考 dts:
 对于分体机,这里还需要单独说明下,分体机分为主板(rk3399 硬件板)+ 头盔板,目前 我们默认的产品形态为,主板不带 lcd 屏,通过 typec 线或者 hdmi 线连接头盔板,所以我 们有上述主显和次显的默认定义,如果需要主板上带屏,则需要另外配置,我们系统默认不 支持这种形态。
对于分体机,这里还需要单独说明下,分体机分为主板(rk3399 硬件板)+ 头盔板,目前 我们默认的产品形态为,主板不带 lcd 屏,通过 typec 线或者 hdmi 线连接头盔板,所以我 们有上述主显和次显的默认定义,如果需要主板上带屏,则需要另外配置,我们系统默认不 支持这种形态。

 由于双屏机器在硬件设计上,屏幕的物理方向有上下相反的两种接法,对应的屏幕扫描方 式也有从下往上扫和从上往下扫两种方式。软件上通过 sys.vr.scan 配置,有 0 和 1 两 种。
如上图所示,该双屏工程机的屏幕排线接在上方,因此屏幕中的扫描方向就是从下往上扫 描,sys.vr.scan 属性应该设置为 0。如果硬件上屏幕排线接在下方(暂时没有样例图), 那么屏幕的扫描方向就和示例图的工程机相反,sys.vr.scan 属性应该设置为 1。
sys.vr.scan 属性如配置错误,会有撕裂现象。该属性的配置还要配合第 2.7 节 vop 取反的 配置,上述讨论的配置都是在 vop 取反关闭的情况下讨论的,如打开 vop 取反,则上述 sys.vr.scan 属性配置也要取反。双屏机器可切换该属性的值进行调试。
2.7 VOP 取反
由于双屏机器在硬件设计上,屏幕的物理方向有上下相反的两种接法,对应的屏幕扫描方 式也有从下往上扫和从上往下扫两种方式。软件上通过 sys.vr.scan 配置,有 0 和 1 两 种。
如上图所示,该双屏工程机的屏幕排线接在上方,因此屏幕中的扫描方向就是从下往上扫 描,sys.vr.scan 属性应该设置为 0。如果硬件上屏幕排线接在下方(暂时没有样例图), 那么屏幕的扫描方向就和示例图的工程机相反,sys.vr.scan 属性应该设置为 1。
sys.vr.scan 属性如配置错误,会有撕裂现象。该属性的配置还要配合第 2.7 节 vop 取反的 配置,上述讨论的配置都是在 vop 取反关闭的情况下讨论的,如打开 vop 取反,则上述 sys.vr.scan 属性配置也要取反。双屏机器可切换该属性的值进行调试。
2.7 VOP 取反
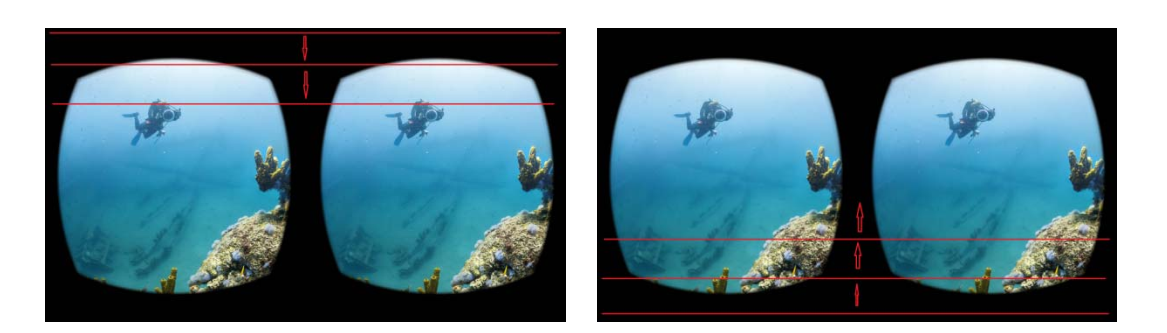 在 VR 系统设计中我们加入了一些优化设计,降低撕裂的概率,例如这边所讲的 vop 取反。 上面两张图的红 {MOD}辅助线表示扫描线。正常情况下,不开启 vop 取反,屏幕的扫描方向是 从上往下,如左图所示;开启 vop 取反,屏幕的扫描方向则是从下往上,如右图所示。
双屏机器建议开启 vop 取反,开启 vop 取反则必须关闭 AFBC,可以降低撕裂的概率。 单屏机器不建议开启 vop 取反,建议开启 AFBC。
开启方法:
sys.vr.pmirror 为 1 则主屏开启镜像,0 则关闭 sys.vr.emirror 为 1 则次屏开启镜像,0 则关闭
2.8 VR 光学参数(FOV)调节
FOV 参数调节请参考《RKVR 光学参数调节》文档
3 VR 系统调试
在 VR 系统设计中我们加入了一些优化设计,降低撕裂的概率,例如这边所讲的 vop 取反。 上面两张图的红 {MOD}辅助线表示扫描线。正常情况下,不开启 vop 取反,屏幕的扫描方向是 从上往下,如左图所示;开启 vop 取反,屏幕的扫描方向则是从下往上,如右图所示。
双屏机器建议开启 vop 取反,开启 vop 取反则必须关闭 AFBC,可以降低撕裂的概率。 单屏机器不建议开启 vop 取反,建议开启 AFBC。
开启方法:
sys.vr.pmirror 为 1 则主屏开启镜像,0 则关闭 sys.vr.emirror 为 1 则次屏开启镜像,0 则关闭
2.8 VR 光学参数(FOV)调节
FOV 参数调节请参考《RKVR 光学参数调节》文档
3 VR 系统调试
 上述图中的 log 分成 3 个部分,每个部分的含义分别说明如下:
1 --> 当前系统配置的单双屏状态值。0 代表单屏,1 代表双屏,配置错误会有撕 裂。参考之前 dsp_mode 配置小点的内容。
2 --> 线程初始化操作,全部 success 为正常,如有 error 出现,会导致撕裂。 如果出现 error,请执行 cat /dev/cpuset/foreground/cpus,结果如下:
上述图中的 log 分成 3 个部分,每个部分的含义分别说明如下:
1 --> 当前系统配置的单双屏状态值。0 代表单屏,1 代表双屏,配置错误会有撕 裂。参考之前 dsp_mode 配置小点的内容。
2 --> 线程初始化操作,全部 success 为正常,如有 error 出现,会导致撕裂。 如果出现 error,请执行 cat /dev/cpuset/foreground/cpus,结果如下:
 如果不是这个结果请检查代码:device/rockchip/rk3399/init.vr.rc 是否有如下 配置,如果没有请确认代码是否更新成功,如果是新加的 init 文件请手动添加。
如果不是这个结果请检查代码:device/rockchip/rk3399/init.vr.rc 是否有如下 配置,如果没有请确认代码是否更新成功,如果是新加的 init 文件请手动添加。

 如上两图,是在屏幕 60fps 刷新率情况下的打印。上图渲染时间充足,而下图的 log 有带#符号字样的超时打印。这个时候就要去看下当前的 CPU GPU DDR 的频率是否过低。
如上两图,是在屏幕 60fps 刷新率情况下的打印。上图渲染时间充足,而下图的 log 有带#符号字样的超时打印。这个时候就要去看下当前的 CPU GPU DDR 的频率是否过低。

 盈鹏飞嵌入式专注于Atmel、TI、NXP、Rockchip等平台产品的研发。公司团队拥有超过10年的ARM软硬件开发经验,拥有智能家居、人机界面、工业缝纫机、电力采集器等多个成功案例;公司2005年成立至今,主要从事工业控制领域开发,先后开发了以ARM9- AT91SAM9G45、Cortex-A8-335x 、A7- i.MX6UL 、A9-I.MX6Q为主控的各种方案,深入WINCE/LINUX 嵌入式系统开发多年,产品以高稳定性,高可靠性获得客户的信赖!2017年我们再出发,依赖工业控制领域多年的设计造诣,公司以创"芯"科技,智造双赢为经营理念,先后开发了以RK3288、RK3399 等处理器为应用的ANDROID解决方案,承接项目定制、BSP以及APP开发,为客户提供专业化的量身定制广告机、消费类电子等解决方案。
盈鹏飞嵌入式专注于Atmel、TI、NXP、Rockchip等平台产品的研发。公司团队拥有超过10年的ARM软硬件开发经验,拥有智能家居、人机界面、工业缝纫机、电力采集器等多个成功案例;公司2005年成立至今,主要从事工业控制领域开发,先后开发了以ARM9- AT91SAM9G45、Cortex-A8-335x 、A7- i.MX6UL 、A9-I.MX6Q为主控的各种方案,深入WINCE/LINUX 嵌入式系统开发多年,产品以高稳定性,高可靠性获得客户的信赖!2017年我们再出发,依赖工业控制领域多年的设计造诣,公司以创"芯"科技,智造双赢为经营理念,先后开发了以RK3288、RK3399 等处理器为应用的ANDROID解决方案,承接项目定制、BSP以及APP开发,为客户提供专业化的量身定制广告机、消费类电子等解决方案。
RK3399 VR Android参数配置和调试说明
1 宏配置
2 系统属性说明
以下提到的屏幕或显示默认都是指主显示,涉及次显的会具体指出。区分主显和副显(次
显)的方法是查看 kernel dts 配置中 vopb_rk_fb 和 vopl_rk_fb 节点的 rockchip,prop 值 为 PRMRY 还是 EXTEND,PRMRY 表示主显,EXTEND 表示次显。对于 VR 来说,目前内核以下三 个参考 dts:
- 分体 VR 头盔 arch/arm64/boot/dts/rockchip/rk3399-disvr-android.dts arch/arm64/boot/dts/rockchip/rk3399-box-rev1-disvr.dts
- 一体 VR 头盔 arch/arm64/boot/dts/rockchip/rk3399-vr-android.dts
对于分体机,这里还需要单独说明下,分体机分为主板(rk3399 硬件板)+ 头盔板,目前 我们默认的产品形态为,主板不带 lcd 屏,通过 typec 线或者 hdmi 线连接头盔板,所以我 们有上述主显和次显的默认定义,如果需要主板上带屏,则需要另外配置,我们系统默认不 支持这种形态。
- 主屏方向
-
- ro.sf.hwrotation 属性
-
- persist.display.portrait 属性
- 次屏方向
-
- ro.orientation.einit 属性
-
- ro.rotation.external 属性
-
- sys.vr.vsync 属性
- 视频是否支持 ATW
-
- vr.video.direct:
- 双屏 LCD 扫描方向
-
- sys.vrscan:
由于双屏机器在硬件设计上,屏幕的物理方向有上下相反的两种接法,对应的屏幕扫描方 式也有从下往上扫和从上往下扫两种方式。软件上通过 sys.vr.scan 配置,有 0 和 1 两 种。
如上图所示,该双屏工程机的屏幕排线接在上方,因此屏幕中的扫描方向就是从下往上扫 描,sys.vr.scan 属性应该设置为 0。如果硬件上屏幕排线接在下方(暂时没有样例图), 那么屏幕的扫描方向就和示例图的工程机相反,sys.vr.scan 属性应该设置为 1。
sys.vr.scan 属性如配置错误,会有撕裂现象。该属性的配置还要配合第 2.7 节 vop 取反的 配置,上述讨论的配置都是在 vop 取反关闭的情况下讨论的,如打开 vop 取反,则上述 sys.vr.scan 属性配置也要取反。双屏机器可切换该属性的值进行调试。
2.7 VOP 取反
在 VR 系统设计中我们加入了一些优化设计,降低撕裂的概率,例如这边所讲的 vop 取反。 上面两张图的红 {MOD}辅助线表示扫描线。正常情况下,不开启 vop 取反,屏幕的扫描方向是 从上往下,如左图所示;开启 vop 取反,屏幕的扫描方向则是从下往上,如右图所示。
双屏机器建议开启 vop 取反,开启 vop 取反则必须关闭 AFBC,可以降低撕裂的概率。 单屏机器不建议开启 vop 取反,建议开启 AFBC。
开启方法:
sys.vr.pmirror 为 1 则主屏开启镜像,0 则关闭 sys.vr.emirror 为 1 则次屏开启镜像,0 则关闭
2.8 VR 光学参数(FOV)调节
FOV 参数调节请参考《RKVR 光学参数调节》文档
3 VR 系统调试
- VR Log 使能和 log 具体含义: setprop sys.vr.log 1
上述图中的 log 分成 3 个部分,每个部分的含义分别说明如下:
1 --> 当前系统配置的单双屏状态值。0 代表单屏,1 代表双屏,配置错误会有撕 裂。参考之前 dsp_mode 配置小点的内容。
2 --> 线程初始化操作,全部 success 为正常,如有 error 出现,会导致撕裂。 如果出现 error,请执行 cat /dev/cpuset/foreground/cpus,结果如下:
如果不是这个结果请检查代码:device/rockchip/rk3399/init.vr.rc 是否有如下 配置,如果没有请确认代码是否更新成功,如果是新加的 init 文件请手动添加。
-
- -->当前系统配置的 fb 的刷新率值。对应机器的/sys/class/graphics/fb0/fps
- /sys/class/graphics/fb5/fps。参考之前 sys.vr.vsync 属性配置的内容。如果 sys.vr.vsync 配置正确,而刷新率不是目标刷新率,请验证是不是 dts 中屏幕的 clock 值是否配置有误。
- 查看应用实时渲染时间: setprop sys.vr.log 1
如上两图,是在屏幕 60fps 刷新率情况下的打印。上图渲染时间充足,而下图的 log 有带#符号字样的超时打印。这个时候就要去看下当前的 CPU GPU DDR 的频率是否过低。
- CPU
- GPU
- DDR
盈鹏飞嵌入式专注于Atmel、TI、NXP、Rockchip等平台产品的研发。公司团队拥有超过10年的ARM软硬件开发经验,拥有智能家居、人机界面、工业缝纫机、电力采集器等多个成功案例;公司2005年成立至今,主要从事工业控制领域开发,先后开发了以ARM9- AT91SAM9G45、Cortex-A8-335x 、A7- i.MX6UL 、A9-I.MX6Q为主控的各种方案,深入WINCE/LINUX 嵌入式系统开发多年,产品以高稳定性,高可靠性获得客户的信赖!2017年我们再出发,依赖工业控制领域多年的设计造诣,公司以创"芯"科技,智造双赢为经营理念,先后开发了以RK3288、RK3399 等处理器为应用的ANDROID解决方案,承接项目定制、BSP以及APP开发,为客户提供专业化的量身定制广告机、消费类电子等解决方案。