{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 wacsysys 的文章《FX2LP cy7c68013——Slave FIFO 与FPGA通信》','https://www.xiaopingtou.net/article-84241.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
1 USB 概述
USB名称解释USB是通用串行总线(Universal Serial Bus)的缩写。能过在计算机运行过程中随意地接入,并且立刻就能投入工作,那么这样的特性叫做即插即用PnP(Plug and Play)。由于USB是主从模式的结构,设备与设备之间、主机与主机之间不能互连。为了解决这个问题,出现了USB OTG(On the go),它的做法:同一个设备,在不同场合下可以在主机与从机之间切换。 USB系统组成
usb系统的三个组成:Host、HUB和Device。
- Host:主控器,能读写usb设备的设备。例如插有U盘的电脑,那么PC就是主控器。
- HUB:扩充USB接口。
- Device(USB Device):如硬盘、打印机、U盘等。
每一个USB设备由一个或多个配置来控制其行为,使用多配置原因是对操作系统的支持;一个配置是由接口(Interface)组成;接口则是由管道(Pipe)组成;管道是和USB设备的端点(Endpoint)对应,端点都是输入输出成对的。在固件编程中,USB设备、配置、接口和管道都来描述符来报告其属性。 一个端点(Endpoint)建立一个管道。管道的端点总是成对出现,即In Endpoint和Out Endpoint。端点0默认为控制管道,其它端点可以配置成数据管道。一个具体的端点,只能工作在一种传输模式下。
- In Endpoint:由device向Host发送数据的端点。
- Out Endpoint:由Host向device发送数据的端点。
USB1.0和USB1.1版本中,只支持1.5Mb/s的低速(low-speed)模式和12Mb/s的全速模式。在USB2.0种,又加入了速度更快(480Mb/s)的高速模式。而USB3.0的最大传输带宽高达5.0Gbps(625MB/s)。 USB可扩展设备
USB1.1规定最多为4层,USB2.0规定最多为6层。理论上,一个USB主控制器最多可接127个设备,这是因为协议规定每个USB设备具有一个7 bit的地址(取值范围0~127),而地址0是保留给未初始化的设备使用。 USB传输类型
虽然USB定义了数据在总线上传输的基本单位是包,但是我们还不能随意地使用包来传输数据,必须按照一定的关系把这些不同的包组织成事务才能传输数据。 事务通常由两个或者三个包组成:令牌包,数据包和握手包。
- 令牌包用来启动一个事务,总是由主机发送。
- 数据包传送数据,可以从主机到设备,也可以从设备到主机,方向由令牌包来制定。
- 握手包的发送者通常为数据接收者,当数据接收正确后,发送握手包。设备也可以使用NAK握手包来表示数据还未准备好。
USB2.0和USB1.1规范的最大不同就是数据帧。在USB1.1规范中,USB数据采用每毫秒一个数据帧的方式进行数据传输,在毫秒数据帧的开始,USB主机首先产生帧开始(SOF)数据包,并传输当前数据帧号,后面是传输数据。对于USB2.0规范,为了支持480Mbps高速传输速度,USB2.0提出了微帧的概念,每毫秒数据帧又包含8个微帧。 USB2.0 端点缓冲区
2 CY7C68013与FPGA
官方资料AN61345 提供了一个示例项目,用以通过从设备 FIFO 接口将 FX2LP 连接至 FPGA。示例实现中描述的接口为各个应用执行高速度的 USB 连接事项,如数据采集、工业控制和监控以及图像处理。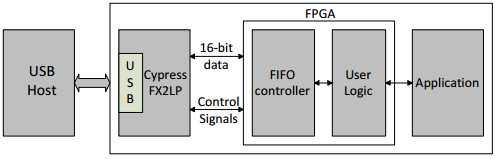
可以通过两个不同的模式将 FX2LP 连接至 FPGA。这两个模式分别为通用可编程接口( GPIF)模式和从设备 FIFO模式。
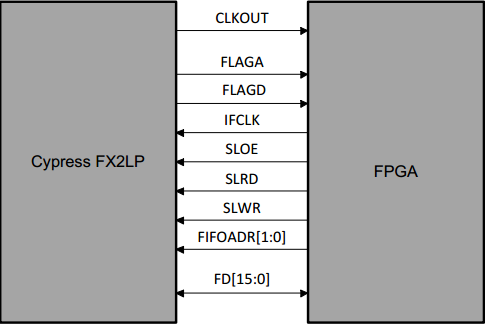
2.1 硬件连接
2.2 固件的实现
利用Cypress Suite USB提供的资源,在此基础上修改例程。FX2LP固件
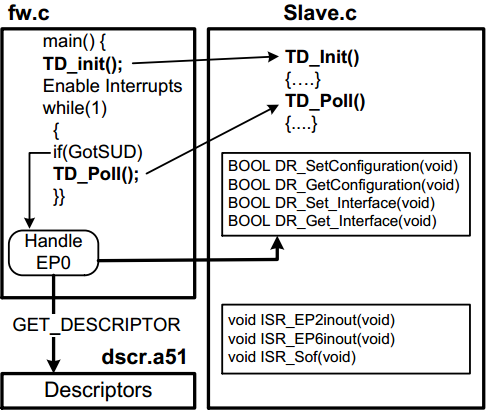
Fw.c 文件包含 main 函数。它执行了 USB 维持的大部分操作(如进行枚举),并且每当需要自定义时,它将调用应用代码( Slave.c)中特定名称的外部函数。一般情况下,不需要修改 Fw.c 文件。执行各个日常操作的步骤后,该函数将调用 Slave.c 所提供的外部函数,即 TD_init。(前缀TD 表示“任务调度” 。然后,它进入一个无限循环,以通过 CONTROL 端点 0 检查 SETUP 数据包的到来。该循环还会检查 USB 暂停事件,但从设备 FIFO 应用不会使用该循环。每次进入该循环时,该函数都将调用 Slave.c 文件中提供的外部函数 TD_Poll。 TD_Poll 函数用于同步化 FPGA 和 FX2LP 间所传输的数据。开始传输数据时,由于 FIFO 被配置为自动模式,因此该函数不会进行任何操作。 每个 USB 外设通过它们的 CONTROL 端点接收两个请求类型:枚举和操作。
枚举
当 与 USB 器 件 连 接 时 , 主 机 PC 将 发 送 多 个GET_DESCRIPTOR 请求以确定器件类型及其要求。这些操作属于枚举过程的一部分。 fw.c 代码截取这些请求,并通过使用 dscr.a51 文件中所存储的数值处理请求。
操作
需要用户代码时, fw.c 将调用一个带有特定名称前缀为 DR(器件请求)的外部函数(存储在 Slave.c 文件中)。对于从设备 FIFO 这种简单的应用,只会使用一个配置和一个借口。因此, 图 14 中所显示的两对 DR_Set-Get 函数只存储由主机发送的“ Set” 值,并在主机发出“ Get” 请求时对该值进行随路。对于更加复杂的配置,您可以使用这些 DR调用( “ hooks” )更改摄像机的分辨率或将请求路由到两个不同的接口等。
固件代码
#pragma NOIV // Do not generate interrupt vectors
#include "fx2.h"
#include "fx2regs.h"
#include "fx2sdly.h" // SYNCDELAY macro
extern BOOL GotSUD; // Received setup data flag
extern BOOL Sleep;
extern BOOL Rwuen;
extern BOOL Selfpwr;
BYTE Configuration; // Current configuration
BYTE AlternateSetting; // Alternate settings
//-----------------------------------------------------------------------------
// Task Dispatcher hooks
// The following hooks are called by the task dispatcher.
//-----------------------------------------------------------------------------
void TD_Init( void )
{ // Called once at startup
CPUCS = 0x10; // CLKSPD[1:0]=10, for 48MHz operation, output CLKOUT
PINFLAGSAB = 0x08; // FLAGA - EP2EF
SYNCDELAY;
PINFLAGSCD = 0x60; // FLAGA - EP6PF
SYNCDELAY;
PORTACFG |= 0x80;
SYNCDELAY;
IFCONFIG = 0xE3; // for async? for sync?
SYNCDELAY;
CPUCS |= 0x02;
// EP4 and EP8 are not used in this implementation...
EP2CFG = 0xA0; //out 512 bytes, 4x, bulk
SYNCDELAY;
EP6CFG = 0xE0; // in 512 bytes, 4x, bulk
SYNCDELAY;
EP4CFG = 0x02; //clear valid bit
SYNCDELAY;
EP8CFG = 0x02; //clear valid bit
SYNCDELAY;
SYNCDELAY;
FIFORESET = 0x80; // activate NAK-ALL to avoid race conditions
SYNCDELAY; // see TRM section 15.14
FIFORESET = 0x02; // reset, FIFO 2
SYNCDELAY; //
FIFORESET = 0x04; // reset, FIFO 4
SYNCDELAY; //
FIFORESET = 0x06; // reset, FIFO 6
SYNCDELAY; //
FIFORESET = 0x08; // reset, FIFO 8
SYNCDELAY; //
FIFORESET = 0x00; // deactivate NAK-ALL
// handle the case where we were already in AUTO mode...
// ...for example: back to back firmware downloads...
SYNCDELAY; //
EP2FIFOCFG = 0x00; // AUTOOUT=0, WORDWIDE=0
// core needs to see AUTOOUT=0 to AUTOOUT=1 switch to arm endp's
SYNCDELAY; //
EP2FIFOCFG = 0x11; // AUTOOUT=1, WORDWIDE
SYNCDELAY; //
EP6FIFOCFG = 0x0D; // AUTOIN=1, ZEROLENIN=1, WORDWIDE=1
SYNCDELAY;
}
void TD_Poll( void )
{ // Called repeatedly while the device is idle
// ...nothing to do... slave fifo's are in AUTO mode...
}
TD_Init 该函数执行以下操作:
- 将 8051 时钟频率设置为 48 MHz。
CPUCS = 0x10;
……
CPUCS |= 0x02;
- 配置 FIFO 标志输出。 FLAGA 被配置为 EP2 OUTFIFO 的空标志, FLAGD 被配置为 EP6 IN FIFO可编程标志(官方的例程:配置为EP6 IN FIFO 的满标志)。
PINFLAGSAB = 0x08; // FLAGA - EP2EF
SYNCDELAY;
PINFLAGSCD = 0x60; // FLAGA - EP6PF
SYNCDELAY;
- 对从设备 FIFO 接口进行配置,使之使用 48 MHz 大小的内部时钟。
IFCONFIG = 0xE3;
- 将 EP2 配置为 BULK-OUT 端点,并将 EP6 配置为BULK-IN 端点。该两个端点均为四倍缓冲,并使用512 字节的 FIFO。由于本设计中没有使用 EP4 和 EP8,所以它们均被取消激活。
EP2CFG = 0xA0; //out 512 bytes, 4x, bulk
SYNCDELAY;
EP6CFG = 0xE0; // in 512 bytes, 4x, bulk
SYNCDELAY;
EP4CFG = 0x02; //clear valid bit
SYNCDELAY;
EP8CFG = 0x02; //clear valid bit
SYNCDELAY;
- 复位 FIFO。
FIFORESET = 0x80; // activate NAK-ALL to avoid race conditions
SYNCDELAY; // see TRM section 15.14
FIFORESET = 0x02; // reset, FIFO 2
SYNCDELAY; //
FIFORESET = 0x04; // reset, FIFO 4
SYNCDELAY; //
FIFORESET = 0x06; // reset, FIFO 6
SYNCDELAY; //
FIFORESET = 0x08; // reset, FIFO 8
SYNCDELAY; //
FIFORESET = 0x00; // deactivate NAK-ALL
SYNCDELAY;
- 分别将端点 2 FIFO 和端点 6 配置为自动输出模式和自动输入模式,同时使用 16 位接口。
EP2FIFOCFG = 0x00; // AUTOOUT=0, WORDWIDE=0
// core needs to see AUTOOUT=0 to AUTOOUT=1 switch to arm endp's
SYNCDELAY; //
EP2FIFOCFG = 0x11; // AUTOOUT=1, WORDWIDE=1
SYNCDELAY; //
EP6FIFOCFG = 0x0D; // AUTOIN=1, ZEROLENIN=1, WORDWIDE=1
SYNCDELAY;
TD_Poll 在 fw.c 文件的无限循环中调用了 TD_Poll。因为EP2和EP6配置为自动输出和输入模式,所以不必要添加代码进行手动操作。
2.3 FPGA代码
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
entity fpga_master is
Port (
fdata : inout STD_LOGIC_VECTOR(15 downto 0); -- FIFO data lines.
faddr : out STD_LOGIC_VECTOR(1 downto 0); -- FIFO select lines
slrd : out STD_LOGIC; -- Read control line
slwr : out STD_LOGIC; -- Write control line
gstate : out STD_LOGIC_VECTOR(3 downto 0); -- debug lines
flagd : in STD_LOGIC; --EP6 full flag
flaga : in STD_LOGIC; --EP2 empty flag
clk : in STD_LOGIC; --Interface Clock
sloe : out STD_LOGIC --Slave Output Enable control
);
end fpga_master;
architecture rtl of fpga_master is
signal faddr_i : STD_LOGIC_VECTOR(1 downto 0);
signal slrd_i : STD_LOGIC;
signal slwr_i : STD_LOGIC;
signal gstate_i : STD_LOGIC_VECTOR(3 downto 0);
signal MasterState : STD_LOGIC_VECTOR(3 downto 0); -- Counter to sequence the fifo signals.
signal sloe_i : STD_LOGIC;
shared variable cnt : integer range 0 to 9 := 0 ;
CONSTANT A: STD_LOGIC_VECTOR (3 DownTo 0) := "0000";
CONSTANT B: STD_LOGIC_VECTOR (3 DownTo 0) := "0001";
CONSTANT C: STD_LOGIC_VECTOR (3 DownTo 0) := "0010";
CONSTANT D: STD_LOGIC_VECTOR (3 DownTo 0) := "0011";
CONSTANT E: STD_LOGIC_VECTOR (3 DownTo 0) := "0100";
CONSTANT F: STD_LOGIC_VECTOR (3 DownTo 0) := "0101";
CONSTANT G: STD_LOGIC_VECTOR (3 DownTo 0) := "0110";
CONSTANT H: STD_LOGIC_VECTOR (3 DownTo 0) := "0111";
begin
slrd <= slrd_i;
slwr <= slwr_i;
faddr <= faddr_i;
gstate<= gstate_i;
sloe <= sloe_i;
process(clk)
variable fdatawe : natural := 0;
variable fifodatabyte : STD_LOGIC_VECTOR(15 downto 0) := "0000000000000000"; -- Local for now.
begin
if(rising_edge(clk)) then
case MasterState(3 downto 0) is
when A => -- IDLE STATE
sloe_i <= '1';
faddr_i <= "10";
slrd_i <= '1';
slwr_i <= '1';
MasterState <= E;
fdatawe := 0;
gstate_i <= "0001";
when E =>
faddr_i <= "10";
slrd_i <= '1';
sloe_i <= '1';
if (flagd = '1') then -- if Full flag is in a deasserted state
slwr_i <= '0'; --assert slave write control signal
fdatawe := 0 ;
fdata <= fifodatabyte;
fifodatabyte := fifodatabyte + '1';
MasterState <= E; -- stay in state E
else
slwr_i <= '1';
MasterState <= A; --when Full flag gets asserted, move to state A
end if;
gstate_i <= "0110";
when others =>--if an undefined state move to IDLE
faddr_i <= "00";
slrd_i <= '1';
sloe_i <= '1';
slwr_i <= '1';
gstate_i <= "1000";
MasterState <= A;
end case;
end if;
end process;
end rtl;