{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 qq_27784463 的文章《步进电机闭环控制设计过程 PID模糊控制》','https://www.xiaopingtou.net/article-86846.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
主控:SAM21G
48脚 Flash 256K

 VDDANA 接3.3V
依据:
VDDANA 接3.3V
依据:
 VDDIO VDDIN 接3.3V
依据:
VDDIO VDDIN 接3.3V
依据:
 电源I/O线,OSC8M和XOSC。电压为1.62V到3.63V。
VDDIN:电源I/O线和内部调节器。电压为1.62V到3.63V
电源I/O线,OSC8M和XOSC。电压为1.62V到3.63V。
VDDIN:电源I/O线和内部调节器。电压为1.62V到3.63V
 VDDCORE
VDDCORE
 VDDCORE:内部稳压输出。核心,内存,外设,fdpll96米,和DFLL48M。电压为1.2 v。
VDDCORE:内部稳压输出。核心,内存,外设,fdpll96米,和DFLL48M。电压为1.2 v。

 PA25 PA24
PA25 PA24
 USB 上的DP和DM对应也就是D+和D-。
USB 上的DP和DM对应也就是D+和D-。
P的意思就是POSITIVE(积极的,正数)
M的意思就是MINUS(负的,减) 晶振可以接PA14 PA15 也可以接PA00 PA01(32K)
晶振可以接PA14 PA15 也可以接PA00 PA01(32K)
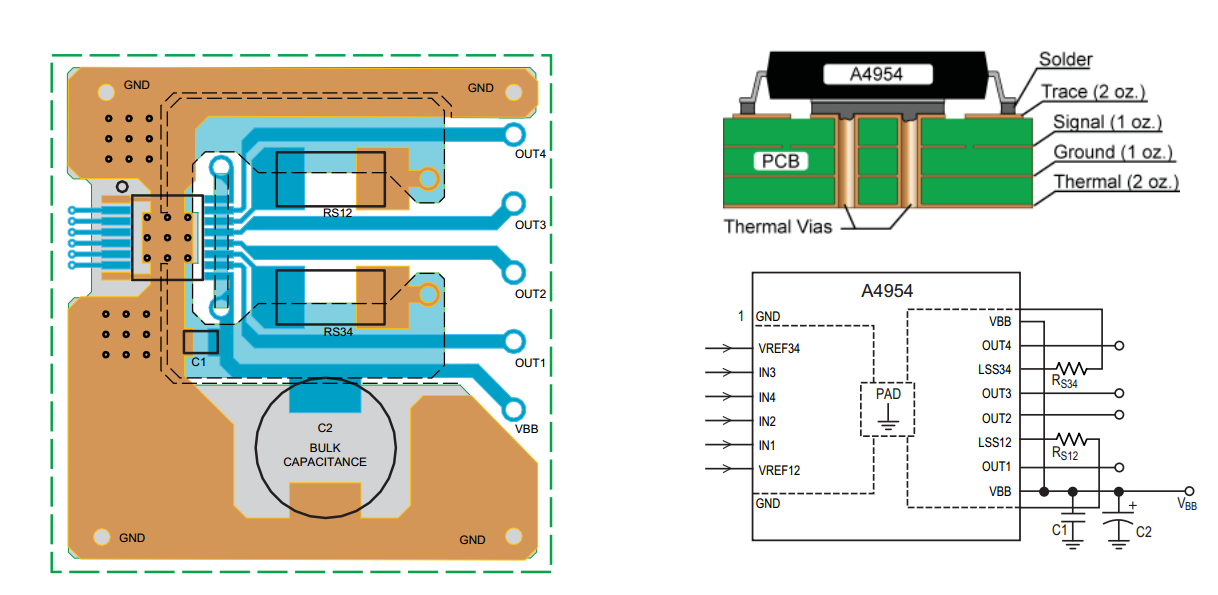
 注意PCB布局时,应该在芯片下打孔 ,为散热考虑。
驱动的输入引脚情况
注意PCB布局时,应该在芯片下打孔 ,为散热考虑。
驱动的输入引脚情况
 引脚名称和功能描述:
引脚名称和功能描述:
 PCB设计尺寸参考:
PCB设计尺寸参考:

电源:
VDDANA 接3.3V
依据:
电源I/O线,OSC8M和XOSC。电压为1.62V到3.63V。
VDDIN:电源I/O线和内部调节器。电压为1.62V到3.63V
Debug 调试
VDDCORE
VDDCORE:内部稳压输出。核心,内存,外设,fdpll96米,和DFLL48M。电压为1.2 v。
I2C
PA22,PA23做IIC用
PA25 PA24
串口
USB 上的DP和DM对应也就是D+和D-。P的意思就是POSITIVE(积极的,正数)
M的意思就是MINUS(负的,减)
晶振:
晶振可以接PA14 PA15 也可以接PA00 PA01(32K)
驱动A4954
原理描述: 通过脉宽调制 (PWM) 控制直流电动机,A4950 能够提供 ±3.5 安培的峰值输出电流,工作电压为 40 伏特。 该产品可提供输入端子,通过外部施加的 PWM 控制信号控制直流电动机的速度与方向。采用内部同步整流控制电路降低脉宽调制 (PWM) 操作时的功率消耗。
注意PCB布局时,应该在芯片下打孔 ,为散热考虑。
驱动的输入引脚情况
引脚名称和功能描述:
PCB设计尺寸参考: