{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 weixin_40874586 的文章《PCF8591芯片以及AD学习》','https://www.xiaopingtou.net/article-87773.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
由于要测多路AD,本身使用的芯片通道不够,差几路决定使用外置ADC完成,后决定使用PCF8591,带IIC后期很好管理。
AD的主要参数:
1、AD的位数:表明这个AD共有2^n个刻度,8位AD,输出的刻度是0~255。 (255=2^8-1) 2、分辨率:就是AD能够分辨的最小的模拟量变化,假设5.10V的系统用8位的AD采样,那么它能分辨的最小电压就是5.10/255=0.02V。 3、INL:Interger NONliner 积分非线性度,表示了ADC器件在所有的数值点上对应的模拟值,和真实值之间误差最大的那一点的误差值。也就是,输出数值偏离线性最大的距离。单位是LSB(即最低位所表示的量)。比如12位ADC:TLC2543,INL值为1LSB。那么,如果基准4.095V,测某电压得的转换结果是1000,那么,真实电压值可能分布在0.999~1.001V之间。这里是这样这样计算得来的,12位ADC最小分辨率是1/4095。在这里即为4.095*(1/4095)=0.001V。那么1LSB就为0.001V,。转换结果为1000即为1V。 4、DNL:Differencial NonLiner-差分非线性度,理论上说,模数器件相邻量个数据之间,模拟量的差值都是一样的。就相一把疏密均匀的尺子。但实际并不如此。一把分辨率1毫米的尺子,相邻两刻度之间也不可能都是1毫米整。那么,ADC相邻两刻度之间最大的差异就叫差分非线性值(Differencial NonLiner)。DNL值如果大于1,那么这个ADC甚至不能保证是单调的,输入电压增大,在某个点数值反而会减小。这种现象在SAR(逐位比较)型ADC中很常见。 5、基准源:有内部基准源、外部基准源等等。 6、转换速率:也就是转换周期的倒数,转换周期就是完成一次AD转换所需的时间。二.PCF8591芯片
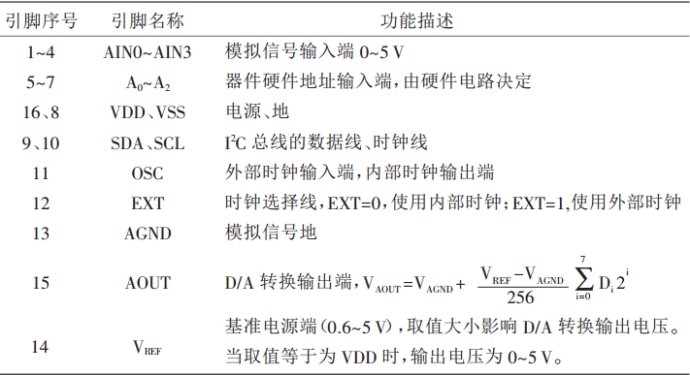
1.电路连接图和引脚功能如下: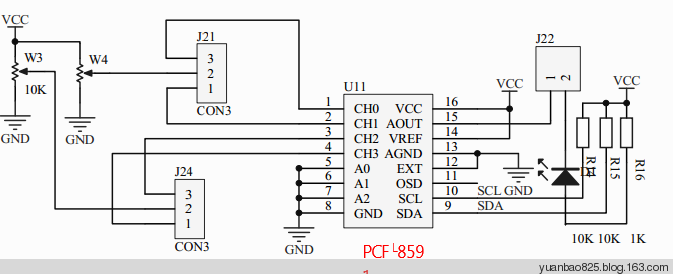
 (1).PCF8591是具有I2C总线借口的8位AD/DA转换芯片,内部为单一电源供电(2.5~6V),典型值为5V,CMOS工艺。PCF8591有4路AD输入,属逐次比较型,内含采样保持电路;1路8位DA输出,内含DAC数据寄存器。AD/DA转换的最大速率约为11KHz。
(2).Philips规定AD器件高四位地址为1001,低三位地址为引脚地址A0,A1,A2,由硬件电路决定。
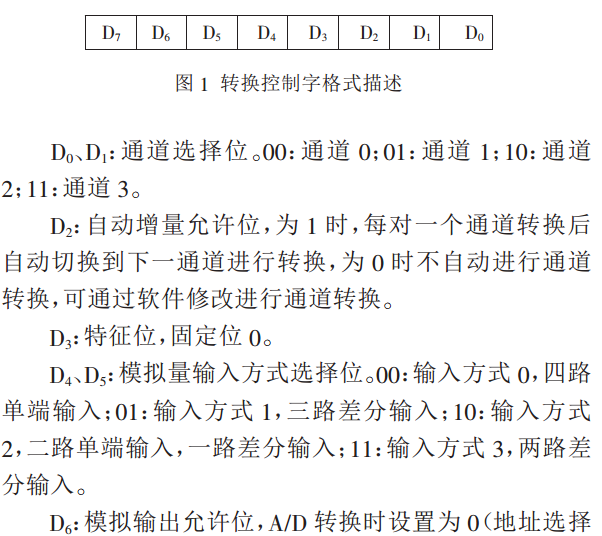
(3).控制寄存器:
(1).PCF8591是具有I2C总线借口的8位AD/DA转换芯片,内部为单一电源供电(2.5~6V),典型值为5V,CMOS工艺。PCF8591有4路AD输入,属逐次比较型,内含采样保持电路;1路8位DA输出,内含DAC数据寄存器。AD/DA转换的最大速率约为11KHz。
(2).Philips规定AD器件高四位地址为1001,低三位地址为引脚地址A0,A1,A2,由硬件电路决定。
(3).控制寄存器:

3.控制流程。
看器件手册可以知道: 在IICa总线中,器件地址必须是起始条件后作为第一个字节发送。发送给PCF8591的第二个字节被存储在控制寄存器,用于控制寄存器的功能。发送给PCF8591的第三个字节被存储到DAC数据寄存器。并使用片上D/A转换成相应的模拟电压。 一个A/D转换周期总是开始于发送一个有效读模式地址给PCF8591之后。A/D转换周期在应答时钟脉冲的后沿被触发。 操作分四步: (1)、发送地址字节,选择该器件。 (2)、发送控制字节,选择相应通道。 // (3)、重新发送地址字节,选择该器件。 (4)、接收目标通道的数据。 这次的程序流程是:AD采样,循环执行。程序如下:
/*
项目名称:PCF8591实现AD转换
项目内容:A/D转换,并把转换的数字信号送给P0口控制LED灯
,调节电位器时观察LED的变化
作者:YUAN
*/
#include
#include //_nop_()延时头文件
typedef unsigned char uChar8;
typedef unsigned int uInt16;
sbit SDA = P1^0;
sbit SCL = P1^1;
#define PCF8591Add 0x90 //PCF8591的器件地址和写操作
//延时函数
void DelayMS(uInt16 lValMS);
void Delay5us(void);
//IIC操作的几个函数
void IICInit(void); //IIC初始化
void IICStart(void); //起始信号
void IICStop(void); //停止信号
void IICAck(void); //应答信号
void IICReadAck(void); //读应答信号
void IICWriteOneByte(uChar8 lByteVal); //写一个字节
uChar8 IICReadOneByte(void); //读一个字节
void PCF8591WriteRegulate(uChar8 lREGVal); //Regulate控制器,这里写控制函数
uChar8 ReadDataPCF8591(void);
void main()
{
IICInit();
while(1)
{
/*写入控制字00,即模拟量输出关闭,选择通道0,
不自动增加通道,模拟量输入围方式0*/
PCF8591WriteRegulate(0x00);
P0 = ReadDataPCF8591();
DelayMS(10);
}
}
void DelayMS(uInt16 lValMS) //延时函数
{
uInt16 luiVal,lujVal;
for(luiVal = 0; luiVal < lValMS; luiVal++)
for(lujVal = 0; lujVal < 113; lujVal++);
}
void Delay5us(void)
{
_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();
}
//IIC总线空闲时均为高电平
void IICInit(void) //IIC初始化
{
SCL = 0;
SDA=1;
Delay5us();
SCL=1;
}
//SCL高电平期间SDA由高到低的变化为起始信号
void IICStart(void) //起始信号
{
SCL = 0;
Delay5us();
SDA = 1;
Delay5us();
SCL = 1;
Delay5us();
SDA = 0;
Delay5us();
//防止接下来SDA数据变化导致IIC总线误判
SCL = 0;
}
//SCL高电平期间SDA由低到高的变化为终止信号
void IICStop(void) //停止信号
{
SCL = 0;
Delay5us();
SDA = 0;
Delay5us();
SCL = 1;
Delay5us();
SDA = 1;
Delay5us();
//防止接下来SDA数据变化导致IIC总线误判
SCL = 0;
}
//一个脉冲期间,SDA为低电平为应答
void IICAck(void) //应答信号
{
SCL = 0;
Delay5us();
SDA = 0;
Delay5us();
SCL = 1;
Delay5us();
SCL = 0;
}
/*cpu读应答信号,如果应答了则
继续传输数据,否则在一定时间里,
默认已经应答,继续传数据
*/
void IICReadAck(void) //读应答信号
{
uChar8 li = 0;
SCL = 0;
SDA = 1; //确保读出的值为0,因此先送1
Delay5us();
SCL = 1;
Delay5us();
//如果没有应答或时间没有超过预定时间则停在此处
while((1 == SDA)&&(li<255))li++;
SCL = 0;
Delay5us();
SDA = 1;
}
/*
写1个字节,先写高位。
*/
void IICWriteOneByte(uChar8 lByteVal) //写一个字节
{
uChar8 li,liVal;
liVal = lByteVal;
for(li=0;li<8;li++)
{
SCL = 0;
Delay5us();
SDA = (bit)(liVal&0x80); //把数据准备好等待传送
Delay5us();
SCL = 1;
Delay5us();
liVal <<= 1;
}
SCL = 0;
Delay5us();
SDA = 1;
}
/*
读取一个字节并把读到的值返回
*/
uChar8 IICReadOneByte(void)
{
uChar8 li,liVal;
SCL = 0;
SDA = 1;
for(li=0;li<8;li++)
{
liVal <<= 1;
SCL = 0;
Delay5us();
SCL = 1;
Delay5us();
liVal = (liVal|SDA);
}
SCL = 0;
return liVal;
}
//Regulate控制器,这里写控制函数
void PCF8591WriteRegulate(uChar8 lREGVal)
{
IICStart();
IICWriteOneByte(PCF8591Add); //PCF8591的地址,写控制
IICReadAck();
IICWriteOneByte(lREGVal); //写入控制字
IICReadAck();
IICStop();
}
uChar8 ReadDataPCF8591(void)
{
uChar8 liVal;
IICStart();
IICWriteOneByte(PCF8591Add|0x01); //PCF8591的地址,读控制
liVal = IICReadOneByte();
IICAck();
IICStop();
return liVal;
}