程序 线程 和程序
- 程序: 完成特定功能的一系列有序指令集合
可执行文件
代码段+数据段 - 进程:程序的一次动态执行过程
代码段+数据段+堆栈段+PCB
一个程序可以对应多个进程
+ 一组寄存器 (IP,SP,状态)
+ 栈
+ errno
+ 信号状态
+ 优先级
fork 和创建新线程的区别
- 当一个进程执行一个fork调用的时候,会创建出进程的一个新的拷贝,新进程将拥有它自己的变量和它自己的PID,这个新的进程运行时间是独立的,它在执行时几乎完全独立于创建它的进程
- 在进程里面创建一个新线程的时候,新的执行线程会拥有自己的堆栈(因此也就有自己的局部变量),但它要和它的创建者共享局部变量、文件描述符、信号处理器和当前的工作目录状态。
线程的优点
线程的缺点
线程调度竞争范围
- 进程竞争范围:各线程在同一进程竞争“被调度的CPU时间”(但不直接和其他进程中的线程竞争)
- 系统竞争范围:线程直接和系统范围内的其他线程竞争
+ N:1 用户线程模型
+ 1:1 核心线程模型
+ N:M混合线程模型
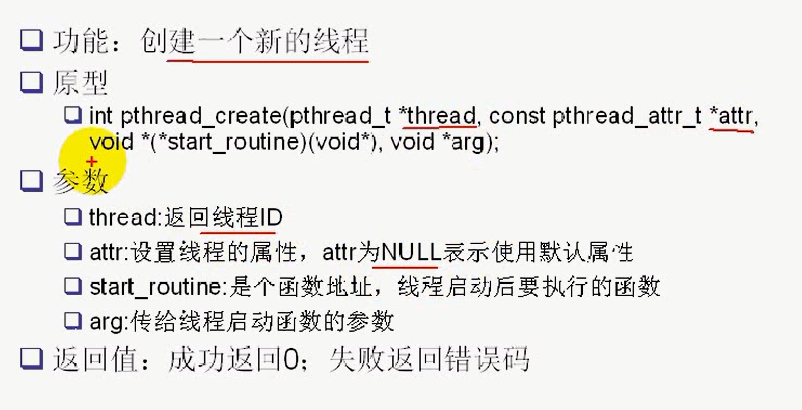
pthread_create函数
pthread_join函数
调用pthread_join等待一个线程终止,把线程和UNix进程相比,pthread_create类似于fork,pthread_join 则类似于waitpid线程结束两种方式:自杀和他杀
自杀pthread_exit 或是用return 他杀
pthread_cancel
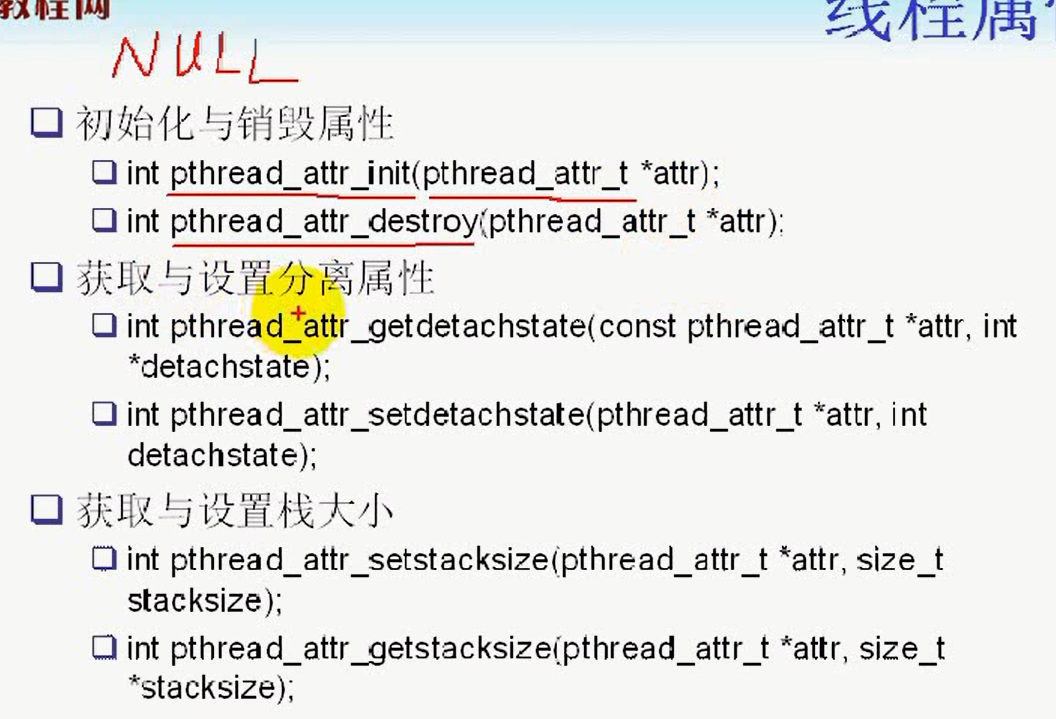
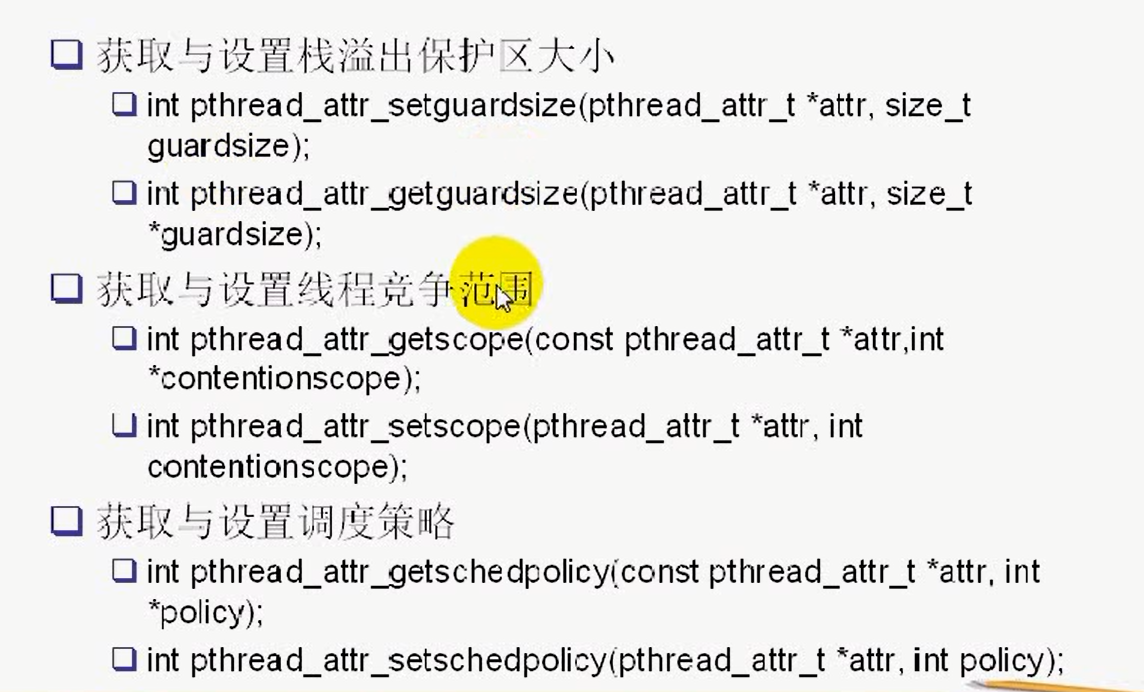
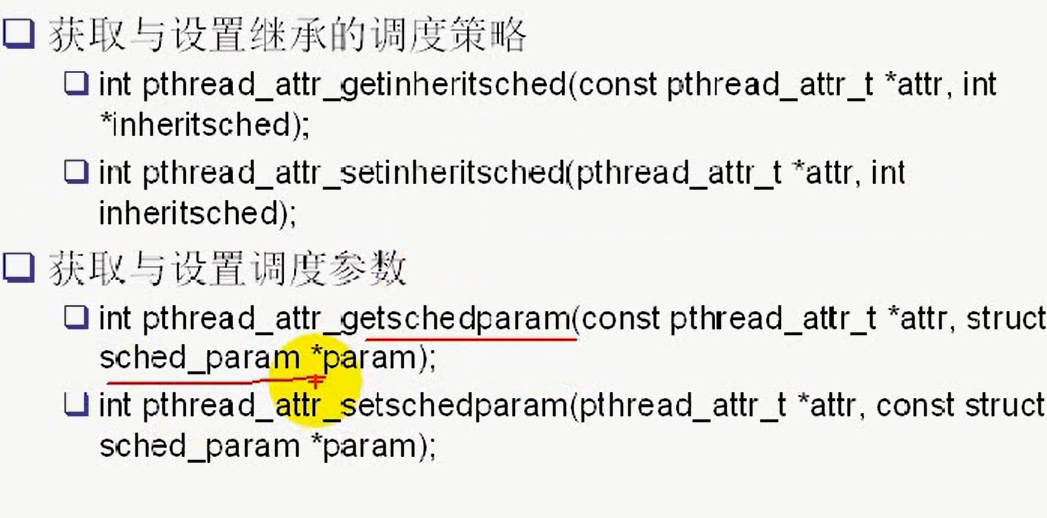
线程的属性
并发级别的设置
- 获取与设置并发级别 : int pthread_setconcurrency(int new_level);
- int pthread_getconcurrency(void);
- 仅在N:M线程模型有效,设置并发级别,给内核一个提示:表示提供给定级别数量的核心线程来映射用户线程是高效的。
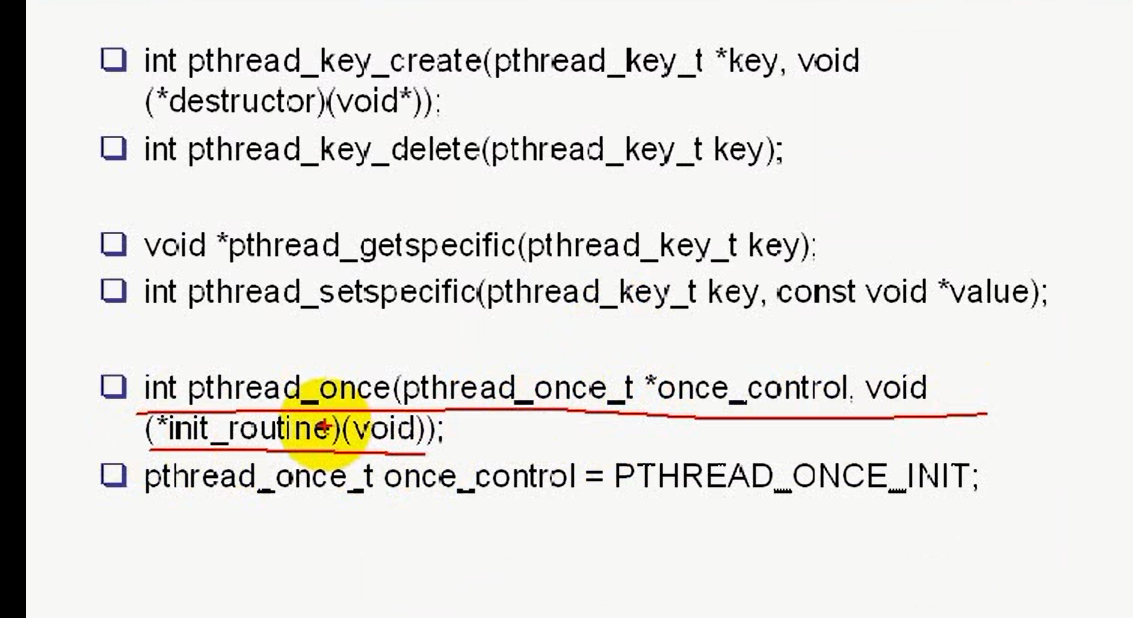
线程特定数据
- 在多线程环境下,由于数据空间是共享的,因此全局变量也为所有线程所共有
- 但有时应用程序设计中有必要提供线程私有的全局变量,仅在某个线程中有效,但却可以跨多个函数访问
- POSIX线程库通过维护一定的数据结构来解决这个问题,这个就称为(Thread-specific Data 或TSD)。
自旋锁
- 自旋锁类似于互斥锁,它的性能比互斥锁要高
- 自旋锁与互斥锁很重要的一个区别在于,线程在申请自旋锁的时候,线程不会被挂起,他处于忙等待的状态 (适合等待比较小的应用)
{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 没法正常呀 的文章《线程和 进程(包括锁)》','https://www.xiaopingtou.net/article-92956.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
读写锁
条件变量
为了解决死锁的问题phread_cond_wait(&g_cond,&g_mutex);
这个函数内部实现了几步机制: + 对g_mutex进行解锁
+ 等待条件,直到线程向它发起通知
+ 重新对g_mutex进行加锁操作
while(1)
{
pthread_mutex_lock(&g_mutex);
while ( nready == 0)
{
printf("%d begin wait condition ...
",num);
pthread_cond_wait(&g_cond,&g_mutex);
}
while(1)
{
pthread_mutex_lock(&g_mutex);
printf("%d begin produce product ...
",num);
++ nready;
pthread_cond_signal(&g_cond);
printf("%d end produce product ...
",num);
printf("%d signal ...
",num);
pthread_mutex_unlock(&g_mutex);
sleep(5);
}
pthread_cond_signal函数
向同一个等待条件的线程发起通知,如果没有任何一个线程处理等待条件的状态,这个通知将被忽略
pthread_cond-broad_cast
向所有等待线程发起通知