{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 admin 的问题《【正点原子探索者STM32F407开发板例程连载+教学】第13章 定时器中断实验-TIMER》','https://www.xiaopingtou.net/q-125312.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
第十三章 定时器中断实验
[mw_shl_code=c,true]1.硬件平台:正点原子探索者STM32F407开发板 2.软件平台:MDK5.1 3.固件库版本:V1.4.0 [/mw_shl_code]这一章,我们将向大家介绍如何使用STM32F4的通用定时器,STM32F4的定时器功能十分强大,有TIME1和TIME8等高级定时器,也有TIME2~TIME5,TIM9~TIM14等通用定时器,还有TIME6和TIME7等基本定时器,总共达14个定时器之多。在本章中,我们将使用TIM3的定时器中断来控制DS1的翻转,在主函数用DS0的翻转来提示程序正在运行。本章,我们选择难度适中的通用定时器来介绍,本章将分为如下几个部分: 13.1 STM32F4通用定时器简介 13.2 硬件设计 13.3 软件设计 13.4下载验证
13.1 STM32F4通用定时器简介
STM32F4的通用定时器包含一个16位或32位自动重载计数器(CNT),该计数器由可编程预分频器(PSC)驱动。STM32F4的通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM)等。 使用定时器预分频器和RCC时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。STM32F4的每个通用定时器都是完全独立的,没有互相共享的任何资源。 STM3的通用TIMx (TIM2~TIM5和TIM9~TIM14)定时器功能包括: 1)16位/32位(仅TIM2和TIM5)向上、向下、向上/向下自动装载计数器(TIMx_CNT),注 意:TIM9~TIM14只支持向上(递增)计数方式。 2)16位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为1~65535之间的任意数值。 3)4个独立通道(TIMx_CH1~4,TIM9~TIM14最多2个通道),这些通道可以用来作为: A.输入捕获 B.输出比较 C.PWM生成(边缘或中间对齐模式) ,注意:TIM9~TIM14不支持中间对齐模式 D.单脉冲模式输出 4)可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用1个定时器控制另外一个定时器)的同步电路。 5)如下事件发生时产生中断/DMA(TIM9~TIM14不支持DMA): A.更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发) B.触发事件(计数器启动、停止、初始化或者由内部/外部触发计数) C.输入捕获 D.输出比较 E.支持针对定位的增量(正交)编码器和霍尔传感器电路(TIM9~TIM14不支持) F.触发输入作为外部时钟或者按周期的电流管理(TIM9~TIM14不支持) 由于STM32F4通用定时器比较复杂,这里我们不再多介绍,请大家直接参考《STM32F4xx中文参考手册》第392页,通用定时器一章。下面我们介绍一下与我们这章的实验密切相关的几个通用定时器的寄存器(以下均以TIM2~TIM5的寄存器介绍,TIM9~TIM14的略有区别,具体请看《STM32F4xx中文参考手册》对应章节)。 首先是控制寄存器1(TIMx_CR1),该寄存器的各位描述如图13.1.1所示: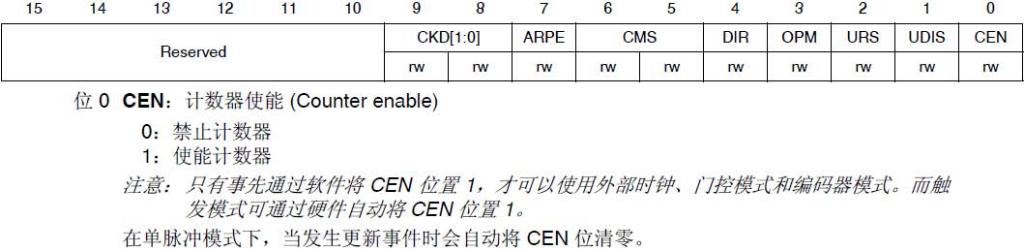
图13.1.1 TIMx_CR1寄存器各位描述 在本实验中,我们只用到了TIMx_CR1的最低位,也就是计数器使能位,该位必须置1,才能让定时器开始计数。接下来介绍第二个与我们这章密切相关的寄存器:DMA/中断使能寄存器(TIMx_DIER)。该寄存器是一个16位的寄存器,其各位描述如图13.1.2所示:


图13.1.3 TIMx_ PSC寄存器各位描述 这里,定时器的时钟来源有4个: 1)内部时钟(CK_INT) 2)外部时钟模式1:外部输入脚(TIx) 3)外部时钟模式2:外部触发输入(ETR),仅适用于TIM2、TIM3、TIM4 4)内部触发输入(ITRx):使用A定时器作为B定时器的预分频器(A为B提供时钟)。 这些时钟,具体选择哪个可以通过TIMx_SMCR寄存器的相关位来设置。这里的CK_INT时钟是从APB1倍频的来的,除非APB1的时钟分频数设置为1(一般都不会是1),否则通用定时器TIMx的时钟是APB1时钟的2倍,当APB1的时钟不分频的时候,通用定时器TIMx的时钟就等于APB1的时钟。这里还要注意的就是高级定时器以及TIM9~TIM11的时钟不是来自APB1,而是来自APB2的。 这里顺带介绍一下TIMx_CNT寄存器,该寄存器是定时器的计数器,该寄存器存储了当前定时器的计数值。 接着我们介绍自动重装载寄存器(TIMx_ARR),该寄存器在物理上实际对应着2个寄存器。一个是程序员可以直接操作的,另外一个是程序员看不到的,这个看不到的寄存器在《STM32F4xx中文参考手册》里面被叫做影子寄存器。事实上真正起作用的是影子寄存器。根据TIMx_CR1寄存器中APRE位的设置:APRE=0时,预装载寄存器的内容可以随时传送到影子寄存器,此时2者是连通的;而APRE=1时,在每一次更新事件(UEV)时,才把预装载寄存器(ARR)的内容传送到影子寄存器。 自动重装载寄存器的各位描述如图13.1.4所示:


13.2 硬件设计
本实验用到的硬件资源有: 1) 指示灯DS0和DS1 2) 定时器TIM3 本章将通过TIM3的中断来控制DS1的亮灭,DS1是直接连接到PF10上的,这个前面已经有介绍了。而TIM3属于STM32F4的内部资源,只需要软件设置即可正常工作。13.3 软件设计
打开我们光盘实验8定时器中断实验可以看到,我们的工程中的HARDWARE下面比以前多了一个time.c文件(包括头文件time.h),这两个文件是我们自己编写。同时还引入了定时器相关的固件库函数文件stm32f4xx_tim.c和头文件stm32f4xx_tim.h。下面我们来看看我们的time.c文件。timer.c文件代码如下: //通用定时器3中断初始化 //arr:自动重装值。 psc:时钟预分频数 //定时器溢出时间计算方法:Tout=((arr+1)*(psc+1))/Ft us. //Ft=定时器工作频率,单位:Mhz //这里使用的是定时器3! void TIM3_Int_Init(u16 arr,u16 psc) { TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //①使能TIM3时钟 TIM_TimeBaseInitStructure.TIM_Period = arr; //自动重装载值 TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //定时器分频 TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式 TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);// ②初始化定时器TIM3 TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //③允许定时器3更新中断 NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQn; //定时器3中断 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x01; //抢占优先级1 NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x03; //响应优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE; NVIC_Init(&NVIC_InitStructure);// ④初始化NVIC TIM_Cmd(TIM3,ENABLE); //⑤使能定时器3 } //定时器3中断服务函数 void TIM3_IRQHandler(void) { if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET) //溢出中断 { LED1=!LED1; } TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位 } 该文件下包含一个中断服务函数和一个定时器3中断初始化函数,中断服务函数比较简单,在每次中断后,判断TIM3的中断类型,如果中断类型正确,则执行LED1(DS1)的翻转。 TIM3_Int_Init函数就是执行我们上面介绍的那5个步骤,使得TIM3开始工作,并开启中断。这里我们分别用标号①~⑤来标注定时器初始化的五个步骤。该函数的2个参数用来设置TIM3的溢出时间。因为系统初始化SystemInit函数里面已经初始化APB1的时钟为4分频,所以APB1的时钟为42M,而从STM32F4的内部时钟树图(图4.3.1.1)得知:当APB1的时钟分频数为1的时候,TIM2~7以及TIM12~14的时钟为APB1的时钟,而如果APB1的时钟分频数不为1,那么TIM2~7以及TIM12~14的时钟频率将为APB1时钟的两倍。因此,TIM3的时钟为84M,再根据我们设计的arr和psc的值,就可以计算中断时间了。计算公式如下: Tout= ((arr+1)*(psc+1))/Tclk; 其中: Tclk:TIM3的输入时钟频率(单位为Mhz)。 Tout:TIM3溢出时间(单位为us)。 timer.h头文件内容比较简单,这里我们就不做讲解。 最后,我们看看主函数代码如下: : int main(void) { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2 delay_init(168); //初始化延时函数 LED_Init(); //初始化LED端口 TIM3_Int_Init(5000-1,8400-1);//定时器时钟84M,分频系数8400,所以84M/8400=10Khz //的计数频率,计数5000次为500ms while(1) { LED0=!LED0; delay_ms(200);//延时200ms }; } 这里的代码和之前大同小异,此段代码对TIM3进行初始化之后,进入死循环等待TIM3溢出中断,当TIM3_CNT的值等于TIM3_ARR的值的时候,就会产生TIM3的更新中断,然后在中断里面取反LED1,TIM3_CNT再从0 开始计数。 这里定时器定时时长500ms是这样计算出来的,定时器的时钟为84Mhz,分频系数为8400,所以分频后的计数频率为84Mhz/8400=10KHz,然后计数到5000,所以时长为5000/10000=0.5s,也就是500ms。13.4 下载验证
在完成软件设计之后,我们将编译好的文件下载到探索者STM32F4开发板上,观看其运行结果是否与我们编写的一致。如果没有错误,我们将看DS0不停闪烁(每400ms闪烁一次),而DS1也是不停的闪烁,但是闪烁时间较DS0慢(1s一次)。 实验详细手册和源码下载地址:http://www.openedv.com/posts/list/41586.htm 正点原子探索者STM32F407开发板购买地址:http://item.taobao.com/item.htm?id=41855882779

友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
控制电机用同一个定时器好,还是两个定时器分别控制也可以?
一周热门 更多>