{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 caosix 的问题《【分享】F4xx的 8路遥控信号捕捉和 8路PWM输出。带IAR6.5/6.7工程。》','https://www.xiaopingtou.net/q-129811.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
最近 几天 看见 坛子里 问 F407 PWM 还有好几个帖子。干脆
做遥控机器人,做遥控飞机的——都直接分享了——
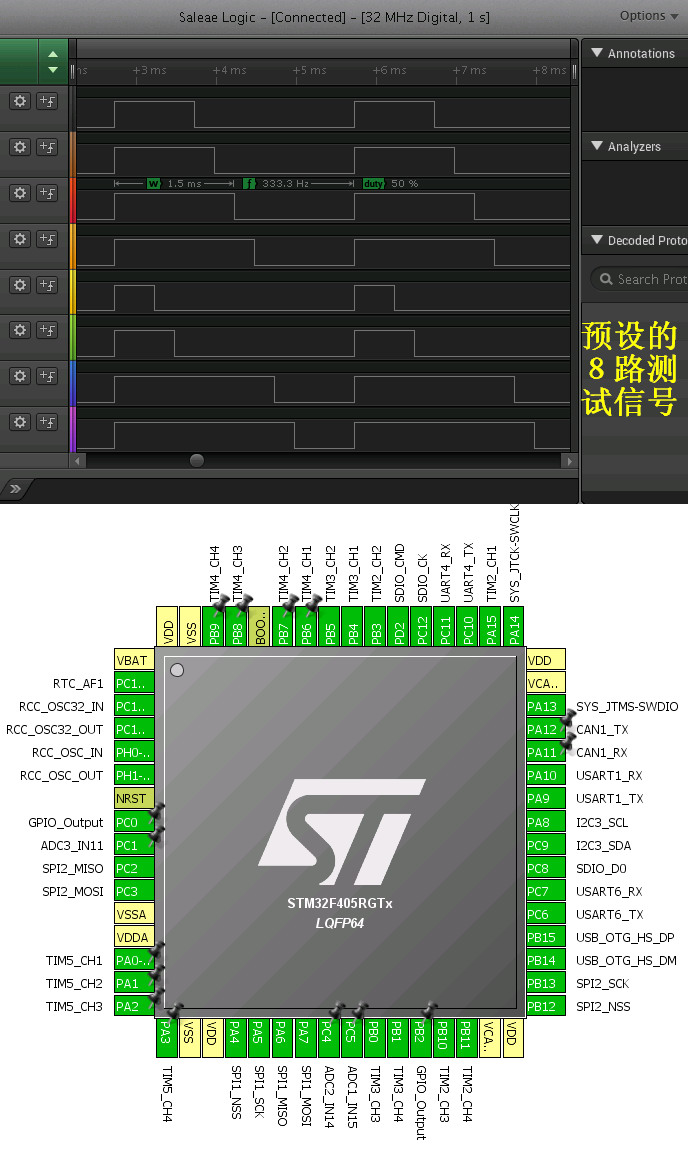
这里:Tim3 和 Tim4 做遥控信号输入捕捉 16位,分辨率 0.25us
Tim4 —— PB6,7,8,9 ,,Tim3 —— PB4,5,0,1 都是输入。
Tim2 和 Tim5 做输出 PWM 信号 32位,你可自己再提高分辨率。
Tim5 —— PA0,1,2,3 ,,Tim2 —— PA15,PB3,10,11 都输出
管脚布局图——含:STM32Cube 的 工程文件 。IAR6.5 6.7 通用。
为了节约资源 IAR 工程包里面 没有【库】,需要用 Cube 去生成。
昨天 在淘宝与某 劣质商家 对峙了 20多分钟,结果【俺 笑了】

做遥控机器人,做遥控飞机的——都直接分享了——
这里:Tim3 和 Tim4 做遥控信号输入捕捉 16位,分辨率 0.25us
Tim4 —— PB6,7,8,9 ,,Tim3 —— PB4,5,0,1 都是输入。
Tim2 和 Tim5 做输出 PWM 信号 32位,你可自己再提高分辨率。
Tim5 —— PA0,1,2,3 ,,Tim2 —— PA15,PB3,10,11 都输出
管脚布局图——含:STM32Cube 的 工程文件 。IAR6.5 6.7 通用。
为了节约资源 IAR 工程包里面 没有【库】,需要用 Cube 去生成。
昨天 在淘宝与某 劣质商家 对峙了 20多分钟,结果【俺 笑了】
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
---------------------------------
Cube 固然是 给 初学者 感觉 F4xx 容易 上手 了。。。
但是 它的 HAL 库 缺少 应用说明书 ,有点 烦人——
所以 俺只好 用 Cube 生成 “骨架 代码” 再 自己 用 位带区 做寄存器 直接操作。。
---------------------------------
还是习惯普通库 这种hal库有些还缺这缺那的
---------------------------------
就是啊,,5楼 说得 很对。。。大家都 苦于 HAL库 缺少 完善的 使用说明书 呢。。。
—— 所以 我写的 程序:都只好 自己 定义 位带区 —— 累呀 1725 文档中 随便举例:
TIM_TIM11_GPIO: TIM11 CH4 input is connected to dedicated Timer pin(default)
TIM_TIM11_HSE: TIM11 CH4 input is connected to HSE_RTC clock (HSE divided by a programmable prescaler)
Return values HAL status —— 究竟 返回了 哪些 ??呢 ??
Notes None.
47.2.15 Extension Callbacks functions
47.2.15.1 HAL_TIMEx_CommutationCallback
一周热门 更多>