{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 laoguren1122 的问题《使用Time1的重复计数器RCR输出一定数量PWM》','https://www.xiaopingtou.net/q-147207.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
我现在使用定时器1输出两路PWM信号,现在需要开始输出一定数量的PWM信号,对比了一下几种实现方法,选择使用重复计数器进行。
但通过软件仿真,发现重复计数器RCR数值有在减小,可以进中断,但还是每次溢出更新产生中断,而不是等RCR减小到0才中断的,RCR没起作用似的。设置中断里关闭定时器好像也不起作用。
手册说明:
如果使用了重复计数器功能,在向上计数达到设置的重复计数次数(TIMx_RCR)时,才产生更新事
件(UEV);否则每次计数器溢出时都产生更新事件。
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能定时器3时钟
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_CenterAligned3; //TIM向上计数模式
TIM_TimeBaseStructure.TIM_RepetitionCounter = 10;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig( TIM1, TIM_IT_Update, ENABLE); // 中断源, TIM 触发中断源 使能
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM1, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);
// TIM_ClearFlag(TIM1, TIM_FLAG_Update); //清中断,以免一启用中断后立即产生中断
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_Cmd(TIM1, ENABLE); //使能TIM3
}
void TIM1_UP_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
TIM_ITConfig(TIM1,TIM_IT_Update, DISABLE);
TIM_CtrlPWMOutputs(TIM1,DISABLE);
TIM_Cmd(TIM1, DISABLE); //关TIM1
}
}
但通过软件仿真,发现重复计数器RCR数值有在减小,可以进中断,但还是每次溢出更新产生中断,而不是等RCR减小到0才中断的,RCR没起作用似的。设置中断里关闭定时器好像也不起作用。
手册说明:
如果使用了重复计数器功能,在向上计数达到设置的重复计数次数(TIMx_RCR)时,才产生更新事
件(UEV);否则每次计数器溢出时都产生更新事件。
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能定时器3时钟
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_CenterAligned3; //TIM向上计数模式
TIM_TimeBaseStructure.TIM_RepetitionCounter = 10;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig( TIM1, TIM_IT_Update, ENABLE); // 中断源, TIM 触发中断源 使能
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM1, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);
// TIM_ClearFlag(TIM1, TIM_FLAG_Update); //清中断,以免一启用中断后立即产生中断
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_Cmd(TIM1, ENABLE); //使能TIM3
}
void TIM1_UP_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
TIM_ITConfig(TIM1,TIM_IT_Update, DISABLE);
TIM_CtrlPWMOutputs(TIM1,DISABLE);
TIM_Cmd(TIM1, DISABLE); //关TIM1
}
}
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
代码(中文注释copy过来就乱了,可以看附件里面的源文件):
//StepMotor.c
#include "StepMotor.h"
#include "SysTick.h"
void StepMotor_Init(u16 TIM1per,u16 PulseNum)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
GPIO_InitTypeDef GPIO_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);//ê1Äü¶¨ê±Æ÷1μÄê±Öó
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//ê1ÄüPORTAμÄê±Öó
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//ê1Äü¸′óÃ1|ÄüμÄê±Öó
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//íÆíìêä3öÄ£ê½
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_11;//PA8ÎaTIM1_CH1
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//TIM1ê±»ùéèÖÃ
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;//2»·Ö¸îê±Öó
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//ÏòéϼÆêy
TIM_TimeBaseInitStruct.TIM_Prescaler = 720;//Ô¤·ÖÆμÖμ,ÿ10us¼Æêy1′Î
TIM_TimeBaseInitStruct.TIM_Period = TIM1per;//ÖØ×°ÔØÖμ
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=PulseNum;//Öظ′′Îêy
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM2;//ÔúÏòéϼÆêyê±,ò»μ©TIMx_CNT<TIMx_CCR1ê±ÎaÎTD§μçƽ,·ñÔòÎaóDD§μçƽ
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//OC4ê1Äüêä3ö
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//óDD§μçƽÎa¸ßμçƽ
TIM_OCInitStruct.TIM_Pulse = TIM1per/2;//±è½Ï2¶»ñ4μÄԤװÔØÖμ
TIM_OC4Init(TIM1,&TIM_OCInitStruct);
TIM_UpdateDisableConfig(TIM1,DISABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStruct.NVIC_IRQChannel=TIM1_UP_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority =1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority =0;
NVIC_Init(&NVIC_InitStruct);
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM1,DISABLE);//½ûóÃTIM1
}
//êä3öò»′®Ö¸¶¨ÆμÂêoíêyá¿μÄÂö3å
//Cycle:Âö3åμÄÖüÆú£¬μ¥λus
//Pulse_Num:Âö3åμĸöêy£¬D¡óú255
void StepMotor_Run(u16 Cycle, u16 Pulse_Num)
{
u16 TIM1per = 0;
//¸Ä±äTIM1μÄÖØ×°Öμ¸Ä±äÂö3åÆμÂ꣬ÕaàïéèÖÃÂö3åÕ¼¿Õ±èÎa50%
TIM1per = Cycle/10; //Ô¤·ÖÆμÎa720,10us¼Æêy1′Î
TIM_SetAutoreload(TIM1, TIM1per-1);//éèÖÃTIM3μÄÖØ×°ÔØÖμ
TIM_SetCompare4(TIM1,TIM1per/2);//Õ¼¿Õ±èÎa50%
TIM_CtrlPWMOutputs (TIM1,ENABLE);
TIM_Cmd(TIM1,ENABLE);//ê1ÄüTIM1
}
//TIM1μÄUpdateÖD¶Ï′|àíoˉêy
void StopTim1(void)
{
if(TIM_GetITStatus(TIM1,TIM_IT_Update)==SET)
{
TIM_ClearITPendingBit(TIM1,TIM_IT_Update);
TIM_CtrlPWMOutputs (TIM1,DISABLE);
TIM_Cmd(TIM1,DISABLE);//ê§ÄüTIM1
Delay_us(5000);
TIM_CtrlPWMOutputs (TIM1,ENABLE);
TIM_Cmd(TIM1,ENABLE);//ê1ÄüTIM1
}
}
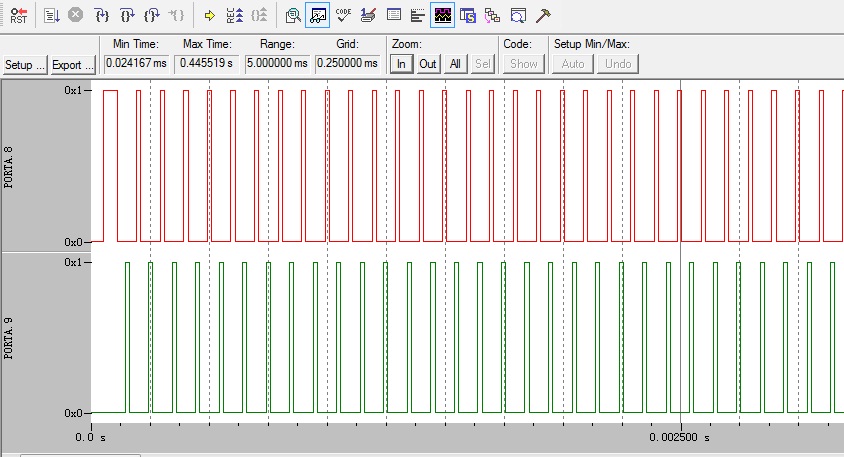
仿真的效果和楼主的一样,但是在示波器上看就没问题。
另采用主从定时器的门控模式也能实现了固定脉冲输出,这个方面结束。
代码(中文注释copy过来就乱了,可以看附件里面的源文件):
//StepMotor.c
#include "StepMotor.h"
#include "SysTick.h"
void StepMotor_Init(u16 TIM1per,u16 PulseNum)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
GPIO_InitTypeDef GPIO_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);//ê1Äü¶¨ê±Æ÷1μÄê±Öó
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//ê1ÄüPORTAμÄê±Öó
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//ê1Äü¸′óÃ1|ÄüμÄê±Öó
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//íÆíìêä3öÄ£ê½
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_11;//PA8ÎaTIM1_CH1
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//TIM1ê±»ùéèÖÃ
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;//2»·Ö¸îê±Öó
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//ÏòéϼÆêy
TIM_TimeBaseInitStruct.TIM_Prescaler = 720;//Ô¤·ÖÆμÖμ,ÿ10us¼Æêy1′Î
TIM_TimeBaseInitStruct.TIM_Period = TIM1per;//ÖØ×°ÔØÖμ
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=PulseNum;//Öظ′′Îêy
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM2;//ÔúÏòéϼÆêyê±,ò»μ©TIMx_CNT<TIMx_CCR1ê±ÎaÎTD§μçƽ,·ñÔòÎaóDD§μçƽ
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//OC4ê1Äüêä3ö
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//óDD§μçƽÎa¸ßμçƽ
TIM_OCInitStruct.TIM_Pulse = TIM1per/2;//±è½Ï2¶»ñ4μÄԤװÔØÖμ
TIM_OC4Init(TIM1,&TIM_OCInitStruct);
TIM_UpdateDisableConfig(TIM1,DISABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStruct.NVIC_IRQChannel=TIM1_UP_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority =1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority =0;
NVIC_Init(&NVIC_InitStruct);
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM1,DISABLE);//½ûóÃTIM1
}
//êä3öò»′®Ö¸¶¨ÆμÂêoíêyá¿μÄÂö3å
//Cycle:Âö3åμÄÖüÆú£¬μ¥λus
//Pulse_Num:Âö3åμĸöêy£¬D¡óú255
void StepMotor_Run(u16 Cycle, u16 Pulse_Num)
{
u16 TIM1per = 0;
//¸Ä±äTIM1μÄÖØ×°Öμ¸Ä±äÂö3åÆμÂ꣬ÕaàïéèÖÃÂö3åÕ¼¿Õ±èÎa50%
TIM1per = Cycle/10; //Ô¤·ÖÆμÎa720,10us¼Æêy1′Î
TIM_SetAutoreload(TIM1, TIM1per-1);//éèÖÃTIM3μÄÖØ×°ÔØÖμ
TIM_SetCompare4(TIM1,TIM1per/2);//Õ¼¿Õ±èÎa50%
TIM_CtrlPWMOutputs (TIM1,ENABLE);
TIM_Cmd(TIM1,ENABLE);//ê1ÄüTIM1
}
//TIM1μÄUpdateÖD¶Ï′|àíoˉêy
void StopTim1(void)
{
if(TIM_GetITStatus(TIM1,TIM_IT_Update)==SET)
{
TIM_ClearITPendingBit(TIM1,TIM_IT_Update);
TIM_CtrlPWMOutputs (TIM1,DISABLE);
TIM_Cmd(TIM1,DISABLE);//ê§ÄüTIM1
Delay_us(5000);
TIM_CtrlPWMOutputs (TIM1,ENABLE);
TIM_Cmd(TIM1,ENABLE);//ê1ÄüTIM1
}
}
仿真的效果和楼主的一样,但是在示波器上看就没问题。
一周热门 更多>