{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 wenwubie 的问题《STM32 红外遥控,控制格力空调疑问》','https://www.xiaopingtou.net/q-147734.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
我使用的是STM32F373CC这个芯片来做红外遥控.选用的是TIM2_CH3(PA2)作为Ir_Out.
第一步,测出格力空调遥控器(型号为:YAD0F1)控制波形如右图(这个是部分的波形),所有的数据解码来如下:
引导码(9ms+4.5ms) 001111001010000000000100000010100100 间隔20ms 000000000000010000000000000010110 间隔40ms 引导码(9ms+4.5ms) 001111001010000000000100000011100100间隔20ms 000000000000000000001100000001110
以上是按一次遥控开命令所读到的所有数据.
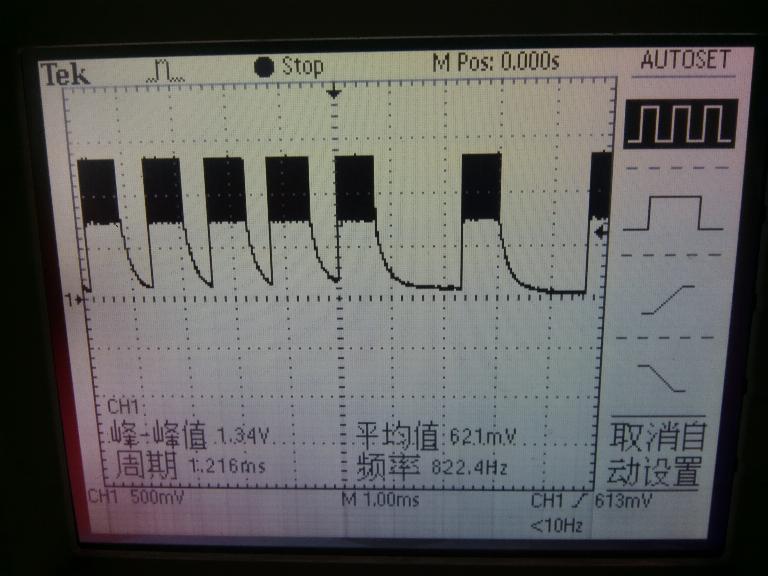
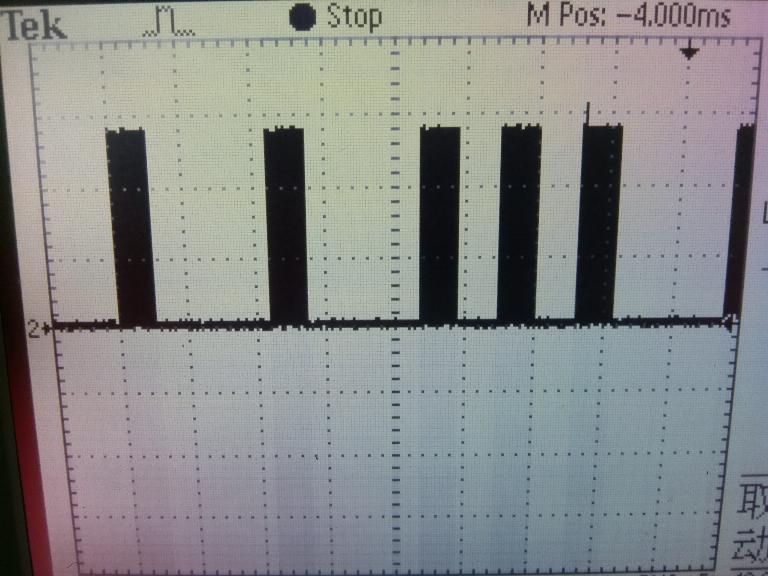
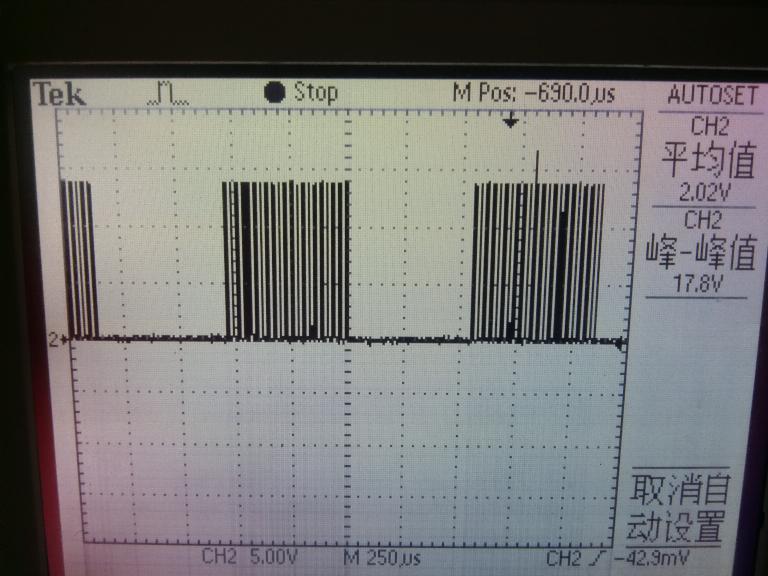
第二步,使用STM32F373的TIM2_CH3发出38K HZ的载波,然后通过systick定时器来开关PWM的输出.输出波形如下:
发送的数据跟遥控解码的数据一模一样.
代码如下:
TIM2定时器配置
void TIM2_Config(void) { // u32 counter=0; uint16_t CCR2_Val = 433;//433 uint16_t PrescalerValue = 0; GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; /* TIM2 clock enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* GPIOA clock enable */ RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); /* GPIOA Configuration: TIM2 CH3 (PA2) */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN ; GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Connect TIM2 pins to AF1 */ GPIO_PinAFConfig(GPIOA, GPIO_PinSource2, GPIO_AF_1); // PrescalerValue = (uint16_t) ((SystemCoreClock) / 38000000) - 1;
/* Time base configuration */ TIM_TimeBaseStructure.TIM_Period = 1314;//1314 TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); /* PWM1 Mode configuration: Channel2 */ TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = CCR2_Val; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM2, &TIM_OCInitStructure); TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
/* TIM2 enable counter */ TIM_Cmd(TIM2, ENABLE); TIM_CtrlPWMOutputs(TIM2, ENABLE); // TIM_SetCompare1(TIM2,625); }
IO口(PA2)模式切换
void ModeChange(u32 mode) { GPIO_InitTypeDef GPIO_InitStructure; RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); if(mode==PWM) { GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOA, GPIO_PinSource2, GPIO_AF_1); } else { GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_ResetBits(GPIOA,GPIO_Pin_2); } } 代码发送函数
void Send_Code(TIM_TypeDef * TIMx) { BootCode(TIMx); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,4); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,1); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,10); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,6); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,1); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,2); delay_ms(20); Logic_ZeroN(TIMx,13); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,14); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,1); Logic_OneN(TIMx,2); Logic_ZeroN(TIMx,1); delay_ms(40); BootCode(TIMx); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,4); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,1); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,10); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,6); Logic_OneN(TIMx,3); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,2); delay_ms(20); Logic_ZeroN(TIMx,20); Logic_OneN(TIMx,2); Logic_ZeroN(TIMx,7); Logic_OneN(TIMx,3); Logic_ZeroN(TIMx,1); }
引导码及逻辑0和逻辑1函数
void BootCode(TIM_TypeDef * TIMx) { TIM_Cmd(TIMx, ENABLE); // ModeChange(PWM); delay_ms(9); TIM_Cmd(TIMx, DISABLE); // ModeChange(Low); delay_us(4500); }
void Logic_One(TIM_TypeDef * TIMx) { ModeChange(PWM); TIM_Cmd(TIMx, ENABLE); delay_us(565);//656 TIM_Cmd(TIMx, DISABLE); ModeChange(Low); delay_us(1695);//1640 }
void Logic_Zero(TIM_TypeDef * TIMx) { ModeChange(PWM); TIM_Cmd(TIMx, ENABLE); delay_us(565);//656 TIM_Cmd(TIMx, DISABLE); ModeChange(Low); delay_us(565);//544 }
void Logic_ZeroN(TIM_TypeDef * TIMx,u32 num) { u32 i=0; for(;i<num;i++) { Logic_Zero(TIMx); } }
void Logic_OneN(TIM_TypeDef * TIMx,u32 num) { u32 i=0; for(;i<num;i++) { Logic_One(TIMx); } }
最后疑问:
1.用试波器测出来的遥控波形为什么跟网上的波形不一致(我用STM32做的波形基本跟网上的差不多)
2.我的波形发出来后,无法控制空调(完全没反应).
请问以上是为什么?是我程序的问题,还是波形调制有问题?
请大侠帮忙指导了,弄了3周了,这个遥控器还没有出来.跪求指导,可加QQ79444528(layman).
万分感激.
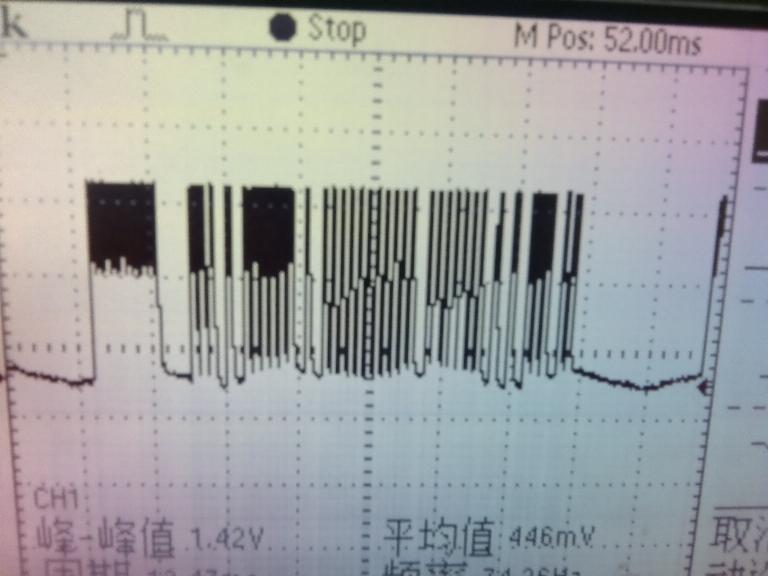
第一步,测出格力空调遥控器(型号为:YAD0F1)控制波形如右图(这个是部分的波形),所有的数据解码来如下:
引导码(9ms+4.5ms) 001111001010000000000100000010100100 间隔20ms 000000000000010000000000000010110 间隔40ms 引导码(9ms+4.5ms) 001111001010000000000100000011100100间隔20ms 000000000000000000001100000001110
以上是按一次遥控开命令所读到的所有数据.
第二步,使用STM32F373的TIM2_CH3发出38K HZ的载波,然后通过systick定时器来开关PWM的输出.输出波形如下:
发送的数据跟遥控解码的数据一模一样.
代码如下:
TIM2定时器配置
void TIM2_Config(void) { // u32 counter=0; uint16_t CCR2_Val = 433;//433 uint16_t PrescalerValue = 0; GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; /* TIM2 clock enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* GPIOA clock enable */ RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); /* GPIOA Configuration: TIM2 CH3 (PA2) */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN ; GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Connect TIM2 pins to AF1 */ GPIO_PinAFConfig(GPIOA, GPIO_PinSource2, GPIO_AF_1); // PrescalerValue = (uint16_t) ((SystemCoreClock) / 38000000) - 1;
/* Time base configuration */ TIM_TimeBaseStructure.TIM_Period = 1314;//1314 TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); /* PWM1 Mode configuration: Channel2 */ TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = CCR2_Val; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM2, &TIM_OCInitStructure); TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
/* TIM2 enable counter */ TIM_Cmd(TIM2, ENABLE); TIM_CtrlPWMOutputs(TIM2, ENABLE); // TIM_SetCompare1(TIM2,625); }
IO口(PA2)模式切换
void ModeChange(u32 mode) { GPIO_InitTypeDef GPIO_InitStructure; RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); if(mode==PWM) { GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOA, GPIO_PinSource2, GPIO_AF_1); } else { GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_ResetBits(GPIOA,GPIO_Pin_2); } } 代码发送函数
void Send_Code(TIM_TypeDef * TIMx) { BootCode(TIMx); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,4); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,1); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,10); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,6); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,1); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,2); delay_ms(20); Logic_ZeroN(TIMx,13); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,14); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,1); Logic_OneN(TIMx,2); Logic_ZeroN(TIMx,1); delay_ms(40); BootCode(TIMx); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,4); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,1); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,10); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,6); Logic_OneN(TIMx,3); Logic_ZeroN(TIMx,2); Logic_OneN(TIMx,1); Logic_ZeroN(TIMx,2); delay_ms(20); Logic_ZeroN(TIMx,20); Logic_OneN(TIMx,2); Logic_ZeroN(TIMx,7); Logic_OneN(TIMx,3); Logic_ZeroN(TIMx,1); }
引导码及逻辑0和逻辑1函数
void BootCode(TIM_TypeDef * TIMx) { TIM_Cmd(TIMx, ENABLE); // ModeChange(PWM); delay_ms(9); TIM_Cmd(TIMx, DISABLE); // ModeChange(Low); delay_us(4500); }
void Logic_One(TIM_TypeDef * TIMx) { ModeChange(PWM); TIM_Cmd(TIMx, ENABLE); delay_us(565);//656 TIM_Cmd(TIMx, DISABLE); ModeChange(Low); delay_us(1695);//1640 }
void Logic_Zero(TIM_TypeDef * TIMx) { ModeChange(PWM); TIM_Cmd(TIMx, ENABLE); delay_us(565);//656 TIM_Cmd(TIMx, DISABLE); ModeChange(Low); delay_us(565);//544 }
void Logic_ZeroN(TIM_TypeDef * TIMx,u32 num) { u32 i=0; for(;i<num;i++) { Logic_Zero(TIMx); } }
void Logic_OneN(TIM_TypeDef * TIMx,u32 num) { u32 i=0; for(;i<num;i++) { Logic_One(TIMx); } }
最后疑问:
1.用试波器测出来的遥控波形为什么跟网上的波形不一致(我用STM32做的波形基本跟网上的差不多)
2.我的波形发出来后,无法控制空调(完全没反应).
请问以上是为什么?是我程序的问题,还是波形调制有问题?
请大侠帮忙指导了,弄了3周了,这个遥控器还没有出来.跪求指导,可加QQ79444528(layman).
万分感激.
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
---------------------------------
---------------------------------
真心求指导啊~~~~~~~~~~~
---------------------------------
你的载波好奇怪啊.
你直接输出PWM试试吧.
无载波,是没法控制的.
测的时候表笔不小心打到x10了,所以把峰峰值电压和平均值电压除以10就是正常的电压.
一周热门 更多>