{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 八度空间 的问题《ucosii我来了,盼了很久,终于移植成功了》','https://www.xiaopingtou.net/q-150357.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
看这个家伙的资料也有一段时间了,最近抽个时间来移植了一下,效果还是可以的,不过那个汇编就折腾了好久没弄懂什么意思,大概的知道怎么回事,具体就完全不懂,呵呵,高手就不要嘲笑了,嘿嘿
废话少说,移植过程
用到的资源是:
A、ST公司提供:STM32F10x开发标准库V3.5
B、实验平台:战舰开发板V2.1
C、编译软件:MDK3.8
D、编辑软件:Source Insight_V3.5
E、RTOS:ucosii_V2.92
F、实验现象设计:红灯亮灭各800ms,绿 {MOD}灯亮灭各300ms
一、获取源码
这个可以百度下载,我们论坛也是有很多的源码工程的,官网可以在这里下载http://micrium.com/downloadcenter/micrium-source-code/
我移植的是2.92版本

二、获取ucosii源码文件
解压下载下来的压缩包,看到如下的文件目录结构
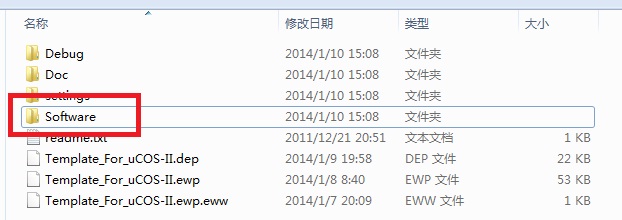
红 {MOD}框框就是ucosii源码文件夹了,双击打开
双击红 {MOD}框框的文件夹进去,看到里面的内容,有没小兴奋一下下呢???
没错,这里就是ucosii源码的所在地了
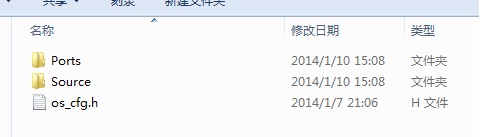
A、在《Ports》文件夹里面的就是ucos与CPU打交道的代码了“看文件夹英文名字就知道了”
B、在《Source》文件夹里面的就是ucos的核心代码了
C、至于os_cfg.h这个文件是干啥的,双击打开一看开头的说明,哦。。。原来是裁剪用的,呵呵,比如打开什么功能,关闭什么功能用的等等,具体请看后面的注释
三、新建测试工程
这里新建立一个工程,比如ucosii什么的(自己建立好就行),我就在工程里面建立了三个文件夹来存放ucosii的代码。根据自己的喜好建立就好,呵呵
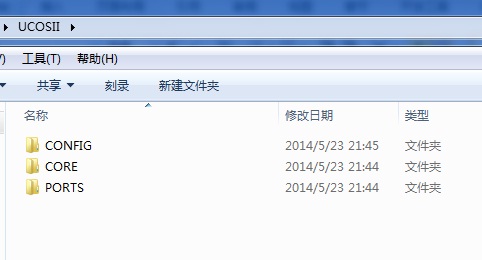
1、将上面提到的《Source》文件夹里面的文件拷贝到《CORE》文件夹里面,这里面的文件是ucos的核心代码,不用修改。
2、将上面提到的《Ports》文件夹里面的文件拷贝到《PORTS》文件夹里面,这里就是移植的核心部分了
3、返回上一级文件夹,将“os_cfg.h”这个文件拷贝到《CONFIG》这个文件夹里面,这里还要添加一个文件,这个文件不在《uCOS-II》这个文件夹里面,具体在哪里呢???
在这里“...ucosApp”这个路径下,看到没“includes.h”这个文件,拷贝到《CONFIG》这个文件夹里面。
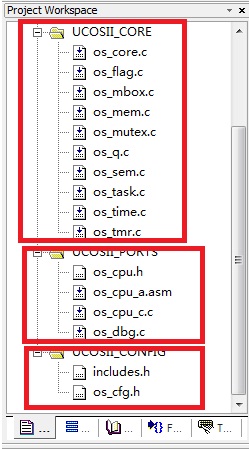
4、在MDK(当然喜欢用其他编辑器的同志也是可以的)添加文件,如下图所示,具体视个人喜好建立目录结构了,我建立了《UCOSII_CORE》、《UCOSII_PORTS》、《UCOSII_CONFIG》这三个文件夹存放ucos的相关代码。
 哈哈。。。接下来就是爽歪歪的环节了。。。
哈哈。。。接下来就是爽歪歪的环节了。。。
四、修改代码
1、地球人都知道的,人有心跳,操作系统也不例外,双击打开“os_cfg.h”这个文件,找到“OS_TICKS_PER_SEC”这个宏定义,原文的是1000即1秒钟了(看后面的注释),这里我将它改为200也就是5ms的节拍,至于这个5ms怎么得来的,根据代码算一下就出来了
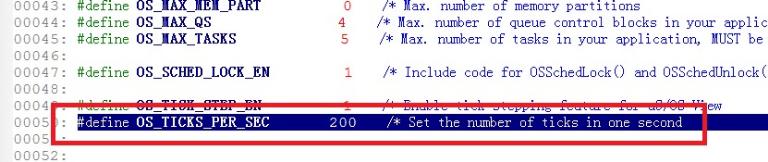
2、找到“OS_MAX_TASKS”这个宏定义,看这个名字就知道干啥的吧,没错,就是最大的任务数,这里我定义为5即最多5个任务,具体数量自己掂量

3、这里我们关闭一部分ucos的功能,例如OS_DEBUG_EN、OS_EVENT_MULTI_EN、OS_EVENT_NAME_EN等等,具体的功能请看定义后面的注释或者本工程代码。
4、前面说到了操作系统的心跳,这里可以用多种方式提供,在CM3里面有个嘀嗒定时器,这个家伙就可以提供了,所以这里我们用它来做操作系统的心跳。修改本工程sys.h中的宏定义_SYSTEM_SUPPORT_ROTS将它的值改为1【如果用到原子哥的SYSTEM文件夹的话,直接将SYSTEM_SUPPORT_UCOS宏定义修改为1即可】。
5、打开“os_cpu_a.asm”文件,修改相关的汇编
A、首先看到的是前面的函数入口代码
修改成上图这个样子,呵呵
B、接着伪定义寄存器和相关的数值
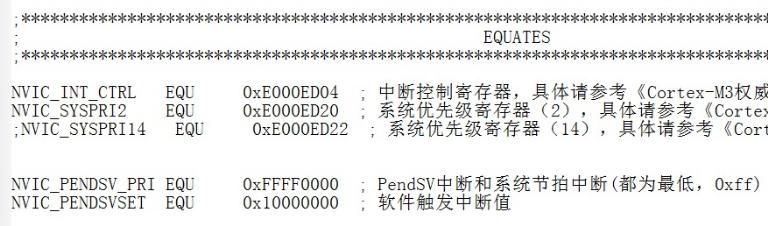
具体寄存器地址和相关的数值可以参考《Cortex-M3权威指南(中文).pdf》第284~286页之间的内容
C、接着下面的改成下图样子
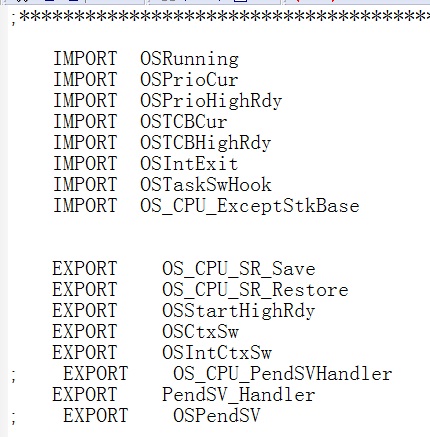
D、将文件拖到最后,那里的程序标好字符就要参考文件开头的定义进行改变了,具体参考代码
6、打开“os_cpu.h”文件,这里主要就是修改相关的数据类型的,视不同平台而修改,详细文件内容见工程。
7、打开“includes.h”这个文件,这里主要就是集合了需要的头文件,删除或者注释一些没用到的,增加里面没有但是需要用到的。详细见工程文件。
A、找到下图处,将其全部注释掉,或者删掉也行,因为这些库这里没用到,但是你的工程有用到的话就保留吧,V2.86之前的版本好像定义了这些文件
B、找到这里,将这个库头文件修改一下
五、main函数编辑
1、在main函数中增加以下内容,注意了,优先级的数值越大就越低,0是最高的优先级,就这样
/* 起始任务相关设置 */ //任务优先级 #define Start_Task_PRIO 10 //优先级最低 //任务堆栈大小 #define Start_STK_Size 64 //任务堆栈空间大小 OS_STK Start_Task_STK[Start_STK_Size]; //任务接口函数 void start_task(void *pdata); /* LED0任务0 */ //任务优先级 #define LED0_Task_PRIO 7 //优先级最低 //任务堆栈大小 #define LED0_STK_Size 64 //任务堆栈空间大小 OS_STK LED0_Task_STK[LED0_STK_Size]; //任务接口函数 void LED0_task(void *pdata); /* LED1任务1 */ //任务优先级 #define LED1_Task_PRIO 6 //优先级最低 //任务堆栈大小 #define LED1_STK_Size 64 //任务堆栈空间大小 OS_STK LED1_Task_STK[LED1_STK_Size]; //任务接口函数 void LED1_task(void *pdata); 上面的主要是设置任务的堆栈大小和中断的优先级了
2、创建任务
int main(void) { OS_Heart_Init(); //初始化ucos心跳 MY_NVIC_PriorityGroup_Config(NVIC_PriorityGroup_2); //初始化中断优先级 USART1_Init(9600); LED_Init(); //初始化LED硬件接口 printf(" system init OK! enter os... "); OSInit(); //初始化ucos OSTaskCreate(start_task, (void *)0, (OS_STK *)&Start_Task_STK[Start_STK_Size-1], Start_Task_PRIO); //创建起始任务 OSStart(); //ucos启动 } /****************************************************************************** * Function Name --> 开始任务 * Description --> none * Input --> *pdata: 任务指针 * Output --> none * Reaturn --> none ******************************************************************************/ void start_task(void * pdata) { OS_CPU_SR cpu_sr=0; pdata = pdata; OS_ENTER_CRITICAL(); //进入临界区,无法被中断打断
printf(" start task ");
OSTaskCreate(LED0_task, (void *)0, (OS_STK *)&LED0_Task_STK[LED0_STK_Size-1], LED0_Task_PRIO); OSTaskCreate(LED1_task, (void *)0, (OS_STK *)&LED1_Task_STK[LED1_STK_Size-1], LED1_Task_PRIO); OSTaskSuspend(Start_Task_PRIO); //挂起起始任务 OS_EXIT_CRITICAL(); //退出临界区,可以被中断打断 } /****************************************************************************** * Function Name --> 任务0 * Description --> none * Input --> *pdata: 任务指针 * Output --> none * Reaturn --> none ******************************************************************************/ void LED0_task(void * pdata) { while(1) { LED0 = 0; delay_ms(800); LED0 = 1; delay_ms(800); }; } /****************************************************************************** * Function Name --> 任务1 * Description --> none * Input --> *pdata: 任务指针 * Output --> none * Reaturn --> none ******************************************************************************/ void LED1_task(void * pdata) { while(1) { LED1 = 0; delay_ms(300); LED1 = 1; delay_ms(300); }; }
六、编译改错
上面工作准备好之后,这时就编译改错即可。直到没有错误和警告,大功告成,哈哈。。。下载到板子上,看到两个灯在不停的闪烁了。一个闪的快一点,一个闪的慢一点
总结:
1、ucosii这个操作系统移植起来还是比较简单的,主要就是这个汇编文件的移植,对应不同的平台用相应平台的代码。
2、如果懒得修改什么的,上官网下载对应的测试工程也是可以的
3、可裁剪性,这个功能非常好,根据不同的任务和需求裁剪自己需要的即可
4、小小的献丑,高手莫见怪了
5、附件是战舰开发板的测试工程,希望能帮到新手
6、 也欢迎各位高手、大神拍砖指导,大家学习学习,共同进步
也欢迎各位高手、大神拍砖指导,大家学习学习,共同进步
废话少说,移植过程
用到的资源是:
A、ST公司提供:STM32F10x开发标准库V3.5
B、实验平台:战舰开发板V2.1
C、编译软件:MDK3.8
D、编辑软件:Source Insight_V3.5
E、RTOS:ucosii_V2.92
F、实验现象设计:红灯亮灭各800ms,绿 {MOD}灯亮灭各300ms
一、获取源码
这个可以百度下载,我们论坛也是有很多的源码工程的,官网可以在这里下载http://micrium.com/downloadcenter/micrium-source-code/
我移植的是2.92版本
二、获取ucosii源码文件
解压下载下来的压缩包,看到如下的文件目录结构
红 {MOD}框框就是ucosii源码文件夹了,双击打开
双击红 {MOD}框框的文件夹进去,看到里面的内容,有没小兴奋一下下呢???
没错,这里就是ucosii源码的所在地了
A、在《Ports》文件夹里面的就是ucos与CPU打交道的代码了“看文件夹英文名字就知道了”
B、在《Source》文件夹里面的就是ucos的核心代码了
C、至于os_cfg.h这个文件是干啥的,双击打开一看开头的说明,哦。。。原来是裁剪用的,呵呵,比如打开什么功能,关闭什么功能用的等等,具体请看后面的注释
三、新建测试工程
这里新建立一个工程,比如ucosii什么的(自己建立好就行),我就在工程里面建立了三个文件夹来存放ucosii的代码。根据自己的喜好建立就好,呵呵
2、将上面提到的《Ports》文件夹里面的文件拷贝到《PORTS》文件夹里面,这里就是移植的核心部分了
3、返回上一级文件夹,将“os_cfg.h”这个文件拷贝到《CONFIG》这个文件夹里面,这里还要添加一个文件,这个文件不在《uCOS-II》这个文件夹里面,具体在哪里呢???
在这里“...ucosApp”这个路径下,看到没“includes.h”这个文件,拷贝到《CONFIG》这个文件夹里面。
4、在MDK(当然喜欢用其他编辑器的同志也是可以的)添加文件,如下图所示,具体视个人喜好建立目录结构了,我建立了《UCOSII_CORE》、《UCOSII_PORTS》、《UCOSII_CONFIG》这三个文件夹存放ucos的相关代码。
哈哈。。。接下来就是爽歪歪的环节了。。。
四、修改代码
1、地球人都知道的,人有心跳,操作系统也不例外,双击打开“os_cfg.h”这个文件,找到“OS_TICKS_PER_SEC”这个宏定义,原文的是1000即1秒钟了(看后面的注释),这里我将它改为200也就是5ms的节拍,至于这个5ms怎么得来的,根据代码算一下就出来了
2、找到“OS_MAX_TASKS”这个宏定义,看这个名字就知道干啥的吧,没错,就是最大的任务数,这里我定义为5即最多5个任务,具体数量自己掂量
3、这里我们关闭一部分ucos的功能,例如OS_DEBUG_EN、OS_EVENT_MULTI_EN、OS_EVENT_NAME_EN等等,具体的功能请看定义后面的注释或者本工程代码。
4、前面说到了操作系统的心跳,这里可以用多种方式提供,在CM3里面有个嘀嗒定时器,这个家伙就可以提供了,所以这里我们用它来做操作系统的心跳。修改本工程sys.h中的宏定义_SYSTEM_SUPPORT_ROTS将它的值改为1【如果用到原子哥的SYSTEM文件夹的话,直接将SYSTEM_SUPPORT_UCOS宏定义修改为1即可】。
5、打开“os_cpu_a.asm”文件,修改相关的汇编
A、首先看到的是前面的函数入口代码
修改成上图这个样子,呵呵
B、接着伪定义寄存器和相关的数值
具体寄存器地址和相关的数值可以参考《Cortex-M3权威指南(中文).pdf》第284~286页之间的内容
C、接着下面的改成下图样子
D、将文件拖到最后,那里的程序标好字符就要参考文件开头的定义进行改变了,具体参考代码
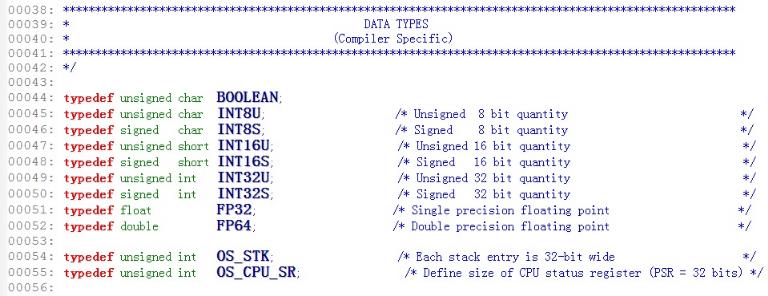
6、打开“os_cpu.h”文件,这里主要就是修改相关的数据类型的,视不同平台而修改,详细文件内容见工程。
7、打开“includes.h”这个文件,这里主要就是集合了需要的头文件,删除或者注释一些没用到的,增加里面没有但是需要用到的。详细见工程文件。
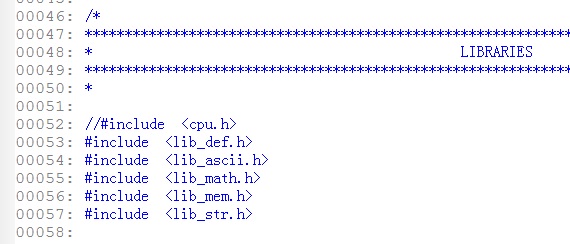
A、找到下图处,将其全部注释掉,或者删掉也行,因为这些库这里没用到,但是你的工程有用到的话就保留吧,V2.86之前的版本好像定义了这些文件
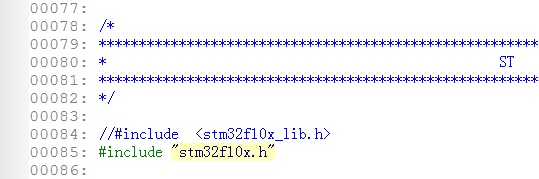
B、找到这里,将这个库头文件修改一下
五、main函数编辑
1、在main函数中增加以下内容,注意了,优先级的数值越大就越低,0是最高的优先级,就这样
/* 起始任务相关设置 */ //任务优先级 #define Start_Task_PRIO 10 //优先级最低 //任务堆栈大小 #define Start_STK_Size 64 //任务堆栈空间大小 OS_STK Start_Task_STK[Start_STK_Size]; //任务接口函数 void start_task(void *pdata); /* LED0任务0 */ //任务优先级 #define LED0_Task_PRIO 7 //优先级最低 //任务堆栈大小 #define LED0_STK_Size 64 //任务堆栈空间大小 OS_STK LED0_Task_STK[LED0_STK_Size]; //任务接口函数 void LED0_task(void *pdata); /* LED1任务1 */ //任务优先级 #define LED1_Task_PRIO 6 //优先级最低 //任务堆栈大小 #define LED1_STK_Size 64 //任务堆栈空间大小 OS_STK LED1_Task_STK[LED1_STK_Size]; //任务接口函数 void LED1_task(void *pdata); 上面的主要是设置任务的堆栈大小和中断的优先级了
2、创建任务
int main(void) { OS_Heart_Init(); //初始化ucos心跳 MY_NVIC_PriorityGroup_Config(NVIC_PriorityGroup_2); //初始化中断优先级 USART1_Init(9600); LED_Init(); //初始化LED硬件接口 printf(" system init OK! enter os... "); OSInit(); //初始化ucos OSTaskCreate(start_task, (void *)0, (OS_STK *)&Start_Task_STK[Start_STK_Size-1], Start_Task_PRIO); //创建起始任务 OSStart(); //ucos启动 } /****************************************************************************** * Function Name --> 开始任务 * Description --> none * Input --> *pdata: 任务指针 * Output --> none * Reaturn --> none ******************************************************************************/ void start_task(void * pdata) { OS_CPU_SR cpu_sr=0; pdata = pdata; OS_ENTER_CRITICAL(); //进入临界区,无法被中断打断
printf(" start task ");
OSTaskCreate(LED0_task, (void *)0, (OS_STK *)&LED0_Task_STK[LED0_STK_Size-1], LED0_Task_PRIO); OSTaskCreate(LED1_task, (void *)0, (OS_STK *)&LED1_Task_STK[LED1_STK_Size-1], LED1_Task_PRIO); OSTaskSuspend(Start_Task_PRIO); //挂起起始任务 OS_EXIT_CRITICAL(); //退出临界区,可以被中断打断 } /****************************************************************************** * Function Name --> 任务0 * Description --> none * Input --> *pdata: 任务指针 * Output --> none * Reaturn --> none ******************************************************************************/ void LED0_task(void * pdata) { while(1) { LED0 = 0; delay_ms(800); LED0 = 1; delay_ms(800); }; } /****************************************************************************** * Function Name --> 任务1 * Description --> none * Input --> *pdata: 任务指针 * Output --> none * Reaturn --> none ******************************************************************************/ void LED1_task(void * pdata) { while(1) { LED1 = 0; delay_ms(300); LED1 = 1; delay_ms(300); }; }
六、编译改错
上面工作准备好之后,这时就编译改错即可。直到没有错误和警告,大功告成,哈哈。。。下载到板子上,看到两个灯在不停的闪烁了。一个闪的快一点,一个闪的慢一点
总结:
1、ucosii这个操作系统移植起来还是比较简单的,主要就是这个汇编文件的移植,对应不同的平台用相应平台的代码。
2、如果懒得修改什么的,上官网下载对应的测试工程也是可以的
3、可裁剪性,这个功能非常好,根据不同的任务和需求裁剪自己需要的即可
4、小小的献丑,高手莫见怪了
5、附件是战舰开发板的测试工程,希望能帮到新手
6、
也欢迎各位高手、大神拍砖指导,大家学习学习,共同进步
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
今天我查了一下官网上uCOS-II的源码:
Micrium-uCOS-II-V290实际是2.91版 发布时间:20121215
源码:里面只有源码和文档,没有相应移植所需的文件(BSP)
针对STM32xxxCPU的uCOS-II源码是:(发布时间都是20121215)
Micrium_STM32xxx_uCOS-II 针对STM32F103VB和STM32F103RB
Micrium_STM32F103ZE-SK_uCOS-II 针对STM32F103ZE
注:这就是移植代码(BSP)+uCOS-II源码+文档。
---------------------------------
下载的源码 好像少了很多东西
---------------------------------
最后调试老是不成功,参考了一下原子哥的,在汇编那里折腾了好久,最后的main函数那里觉得原子哥这样很好,所以就借鉴了,呵呵
一周热门 更多>