分析A,B两路方波的逻辑状态发现A,B两路方波在任意时刻下只有一路信号发生逻辑状态变化。如果在逻辑状态变化前A,B两路的状态相同,那么变化后的逻辑状态肯定相异;如果变化前A,B两路方波逻辑状态相异,那么变化后逻辑状态肯定相同。只需对这两路信号异或,就能提取光栅尺运动的方向信号updown以及与运动距离成正比的计数脉冲cp。 function ImgZoom(Id)//重新设置图片大小 防止撑破表格 { var w = $(Id).width; var m = 650; if(w
EPM240含有240个逻辑单元(LE),等效于192个宏单元;8 192 bit的用户Flash存储器,可满足用户小容量信息存储要求:最大用户I/O数为80,最快速度为4.5 ns,完全满足系统设计要求。 function ImgZoom(Id)//重新设置图片大小 防止撑破表格 { var w = $(Id).width; var m = 650; if(w
{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 szcxwgyc 的问题《基于MCU+CPLD的新型光栅数显系统研发介绍》','https://www.xiaopingtou.net/q-155982.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
利用CPLD实现正交脉冲处理逻辑电路,而可逆计数器则用于处理计数光栅尺输出的正交脉冲,CPLD的高速并行处理能力可保证光栅尺输出信号无遗漏采样,从而确保计数的可靠性。可逆计数器的值通过MCU一系列运算后转换为机床加工的长度值、MCU再将其长度值回送至CPLD并在数码管上显示。
此外,CPLD还具有7×8键盘按键检测和去抖功能,将处理后的可靠按键送至MCU。MCU主要用于液晶屏的显示控制、掉电数据保存,以及复杂的数学运算。系统工作原理框图如图1所示。
3.1 正交脉冲采集
光栅尺输出一组正交脉冲信号,即相位差为90°的两路方波,如图2所示。当光栅尺正向移动一个栅距时,光栅尺输出一个00—01一11—10—00循环,A路方波相位超前于B路90°;当光栅尺反向移动一个栅距时,光栅传感器输出一个00—10一11一01一00循环,A路方波相位滞后B路90°。
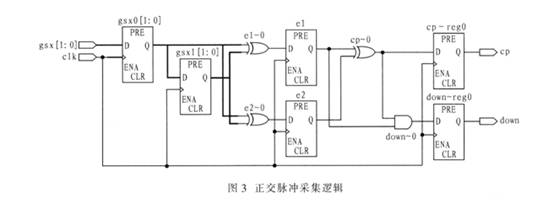
分析A,B两路方波的逻辑状态发现A,B两路方波在任意时刻下只有一路信号发生逻辑状态变化。如果在逻辑状态变化前A,B两路的状态相同,那么变化后的逻辑状态肯定相异;如果变化前A,B两路方波逻辑状态相异,那么变化后逻辑状态肯定相同。只需对这两路信号异或,就能提取光栅尺运动的方向信号updown以及与运动距离成正比的计数脉冲cp。 function ImgZoom(Id)//重新设置图片大小 防止撑破表格 { var w = $(Id).width; var m = 650; if(w
由图2看出,光栅尺移动一个栅距将输出4个cp脉冲,系统测量的最小分辨率提高至1/4栅距,通常称为四裂相或四倍频。CPLD在每个clk的上升沿检测A,B两路方波的状态,首先分别对当前检测的状态A0,B0和上次检测的状态A1,B1相异或,然后将两次异或值再异或。如果最后异或值为1,则说明A,B两路方波发生变化,则向可逆计数器输入一个高电平宽度为1个clk周期的计数脉冲cp,实现逻辑如图3所示。

3.2 可逆计数器将提取的方向信号updown和计数脉冲cp输入至可逆计数器,实现对光栅尺输出的正交脉冲计数。可逆计数器模块的VHDL程序如下:
3.3 clk的取值
由于CPLD的采样时钟clk必须大于8倍光栅尺输出的正交脉冲,因此系统不会丢失信号。该系统设计使用40 MHz有源晶体振荡器作为CPLD的采样时钟源,可记录的最大光栅传感器输出信号频率为5 MHz。如果使用50线/mm的光栅尺,经过CPLD的四裂相细分后,计算该光栅尺接该系统的最大不漏数加工速度为20 μmx5 MHz="100" m/s,最小分辨率为5μm。远远超出机床运行的极限速度,完全满足实际需求。
3.4 EPM240简介
选用Altera公司的EPM240作为CPLD,EPM240是MAX Ⅱ系列器件中的一员。MAX Ⅱ CPLD系列的体系结构使其在所有CPLD系列器件的单位I/O引脚的功耗和成本最低;支持高达300 MHz的内部时钟频率,面向通用低密度逻辑应用,MAX Ⅱ CPLD可替代高功耗和高成本 ASSP 以及标准逻辑CPLD。
EPM240含有240个逻辑单元(LE),等效于192个宏单元;8 192 bit的用户Flash存储器,可满足用户小容量信息存储要求:最大用户I/O数为80,最快速度为4.5 ns,完全满足系统设计要求。 function ImgZoom(Id)//重新设置图片大小 防止撑破表格 { var w = $(Id).width; var m = 650; if(w
掉电数据存储是系统设计的另一重要功能,要求高可靠性。系统在掉电时应保存光栅尺的当前位置信息,下次开机时通过调用上次掉电时保存的位置信息恢复系统。因此,掉电瞬间,掉电报警电路将迅速响应.向MCU_ 发出报警信号;MCU检测到报警信号后,马上进行相应处理,将当时光栅尺的当前位置信息存入EEPROM。其硬件电路如图4所示。
为了提高MCU的掉电响应速度,增强系统可靠性,系统设计采用新的增强型51单片机STC-89C516RD。该器件具有1 KB RAM和高达64 KB大容量ROM,ISP 功能,指令周期有6clock和12clock两种可选模式。使用20 MHz晶体振荡器,采用6clock模式烧写时,单指令周期的程序执行时问仅为0.3μs,比普通51单片机在最高24 MHz晶体振荡器下的运行速度要快得多。因此,大大缩短了掉电数据存储程序的执行时间。
4.1 掉电报警电路
选用超小型高精度电压检测器S80848,内部检测电压固定为4.8 V,精度为±2%,最大响应时间为60μs。S80848采用标准5 V供电,电源正常时输出高电平;当电源电压降至4.8 V时,则输出低电平。将S80848的输出脚连接至MCU 的INT0,并将MCU的INT0设置为电平触发。因此,电源电压只要低于4.8 V就会使MCU进入INT0中断,MCU在中断程序中保存位置信息。
4.2 EEPROM选取
当MCU对EEPROM的写操作完成后,EEP-ROM需用10 ms的最大自写入时间将信息写入存储单元。为了使用更多的时间用于EEPROM自写入,选用低压EEPROM,即AT24C64—2.7 V,其工作电压为5.5 V~2.7 V,容量为64 KB,每页为32 B,最大写入次数为1 000 000。
4.3 掉电时间计算
选用工作电压为4.5 V~5.5 V的STC89C516RD,当电源电压降至4.5 V以下时,MCU不能可靠工作。MCU的INT0的中断服务程序只能使用电源电压从4.8 V降至4.5 V的这段时间,所有处理必须在该段时间内完成。因此中断程序设计时应尽量考虑使其执行时间最短,中断应先将所有存储的数据存入一个数组,然后将该数组的所有元素写入AT24C64,当然该数组的元素数必须小于AT24C64一页的长度.即必须小于32 B。
当输出电压为5 V时,最大电流为,Imax=0.8 A,等效负载R=5/I=6.25 Ω,与5 V电源并联的电容C=4700μF,则系统时间常数为丁:τ=RC=0.029 s。设发生掉电t=0,根据公式u(t)=Vcc exp(一t/τ)=5 exp(一t/0.029)可知:t=1 183 μs时,电源电压Vcc从5 V降至4.8 V;t=3 055μs时,Vcc降至4.5 V;t=17 869μs时,Vcc降到2.7 V。MCU的中断服务程序时间为3 055-1 183=1872μs,故大于实测中断服务程序时间1 350μs;EEPROM自写入有效时间为17 869-3 055=14 814μs,故完全满足EEPROM写入要求。 function ImgZoom(Id)//重新设置图片大小 防止撑破表格 { var w = $(Id).width; var m = 650; if(w
4.4 中断服务程序
为了避免MCU频繁写入EEPROM,使用次数超出最大有效写入次数。中断程序对中断输入引脚上的电平进行必要滤波。滤波算法为:系统进入中断程序后,首先关闭中断,然后连续10次判断INT0的电平,如果每次判断得到的电平值都为低,则继续往下执行中断服务程序,只要有一次为高则立即退出中断服务程序。完成写入数据,要确保INT0上的低电平解除后再返回中断,否则等待,直至低电平解除。中断服务程序流程图如图5所示。
详细介绍光栅数显系统设计,采用CPLD可大大简化系统硬件设计,降低系统成本,增强系统可靠性和灵活性。选用STC89C516RD,可避免扩展外部存储器,从而简化单片机的外围电路设计。
一周热门 更多>