{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 爱则倾心 的问题《DMA方式控制PWM脉冲数量、频率、占空比,用于步进、伺服.....》','https://www.xiaopingtou.net/q-157491.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
本帖最后由 爱则倾心 于 2016-3-30 18:09 编辑
关键词:STM32、CubeMX、DMA、TIM、PWM、伺服电机控制
1、关于ST的CubeMX,目前来说,让人又爱又恨,恨比爱多。一是从标准库转用Cube库比较费劲,二是ST不在更新标准库,新出的片子只能用Cube库或直接玩寄存器,三是目前来说Cbue里面到处都是地雷.....
2、项目开始前从网上查了一些精确产生PWM脉冲个数的方法,引述如下:
1)外部再弄个IO口接到PWM脚上,用外部中断的办法,单独来计数。此办法可行,但非常不科学,并且浪费资源。
2)使用定时器,使用一个和PWM频率一致的定时器,使用定时器中断来计数。此方法比第一种办法好了很多,但是仍然感觉比较笨,并且单片机会频繁的进中断......
3)利用定时器内部互联,一个定时器的给另一个定时器提供时钟,主从模式,一个PWM输出脉冲给另一个定时提供时钟,每来一个脉冲,计数器值+1,当+到指定个数后,产生一次中断,然后关闭PWM输出。此方法还是浪费资源,且多路电机控制需 要产生多路频率不同、个数不同的脉冲时就不能满足要求了。
4)使用DMA来控制发送的脉冲数,最大可以65535个,如果想使用不同频率和脉宽,可以设置不同的装载值,如果你发送的脉冲数超过65535个,则可以使用DMA传输完成中断中切换DMA传输的数据起始地址及发送数量,继续发送。这个方法即方便,又减轻CPU的负担,可以同时驱动多个电机工作,还可以根据电机的启动-运行-停止使用不同的频率。
3、上数第4)种方法甚好,只是没有大神们没能具体说明如何实现,根据项目需要,选定第4)种方式实现多路、不同频率、不同脉宽、数量精确可控的PWM波。项目仍在开展中,时间有限,本帖今天起开始说说第4)方式的具体实现方法。
4、硬件平台:STM32L476G-DISCO,TIM2、CH1、PA0、DMA1,软件平台:STM32CubeMX+MDK V5.15。
5、软件实现步骤及关键点说明......回家了,待续......
5.1、使用Cube MX---->new project---->选择单片机型号---->选择TIM2的时钟源、通道及模式
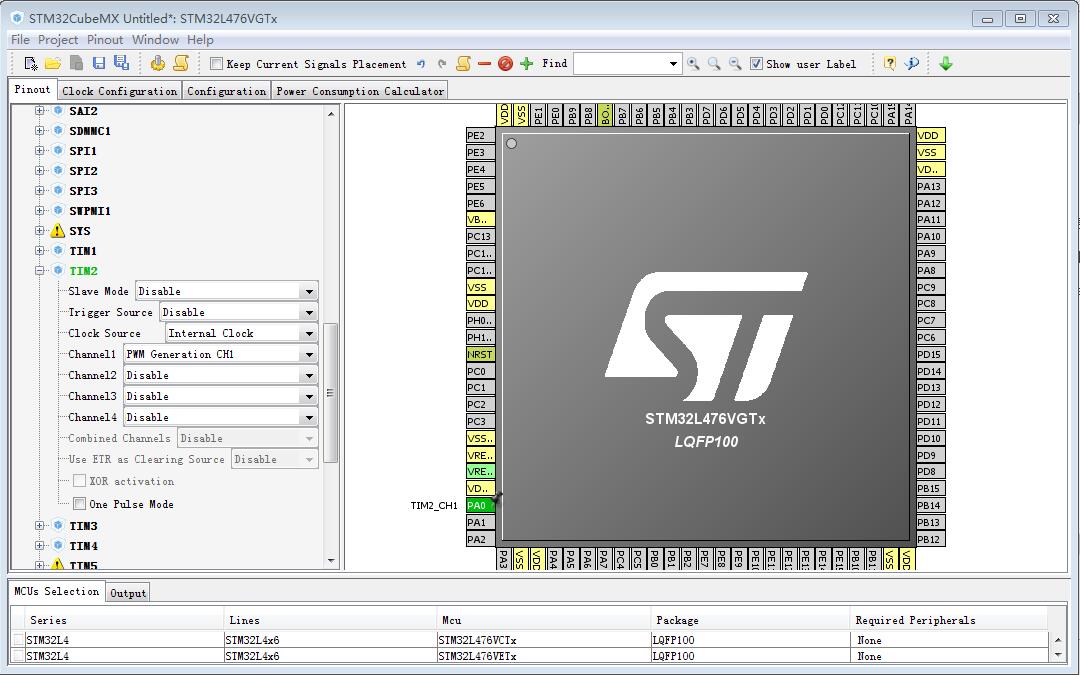 CUBE_GENERATOR.jpg (32.61 KB, 下载次数: 0)
下载附件
2016-3-30 18:07 上传
CUBE_GENERATOR.jpg (32.61 KB, 下载次数: 0)
下载附件
2016-3-30 18:07 上传
关键词:STM32、CubeMX、DMA、TIM、PWM、伺服电机控制
1、关于ST的CubeMX,目前来说,让人又爱又恨,恨比爱多。一是从标准库转用Cube库比较费劲,二是ST不在更新标准库,新出的片子只能用Cube库或直接玩寄存器,三是目前来说Cbue里面到处都是地雷.....
2、项目开始前从网上查了一些精确产生PWM脉冲个数的方法,引述如下:
1)外部再弄个IO口接到PWM脚上,用外部中断的办法,单独来计数。此办法可行,但非常不科学,并且浪费资源。
2)使用定时器,使用一个和PWM频率一致的定时器,使用定时器中断来计数。此方法比第一种办法好了很多,但是仍然感觉比较笨,并且单片机会频繁的进中断......
3)利用定时器内部互联,一个定时器的给另一个定时器提供时钟,主从模式,一个PWM输出脉冲给另一个定时提供时钟,每来一个脉冲,计数器值+1,当+到指定个数后,产生一次中断,然后关闭PWM输出。此方法还是浪费资源,且多路电机控制需 要产生多路频率不同、个数不同的脉冲时就不能满足要求了。
4)使用DMA来控制发送的脉冲数,最大可以65535个,如果想使用不同频率和脉宽,可以设置不同的装载值,如果你发送的脉冲数超过65535个,则可以使用DMA传输完成中断中切换DMA传输的数据起始地址及发送数量,继续发送。这个方法即方便,又减轻CPU的负担,可以同时驱动多个电机工作,还可以根据电机的启动-运行-停止使用不同的频率。
3、上数第4)种方法甚好,只是没有大神们没能具体说明如何实现,根据项目需要,选定第4)种方式实现多路、不同频率、不同脉宽、数量精确可控的PWM波。项目仍在开展中,时间有限,本帖今天起开始说说第4)方式的具体实现方法。
4、硬件平台:STM32L476G-DISCO,TIM2、CH1、PA0、DMA1,软件平台:STM32CubeMX+MDK V5.15。
5、软件实现步骤及关键点说明......回家了,待续......
5.1、使用Cube MX---->new project---->选择单片机型号---->选择TIM2的时钟源、通道及模式
CUBE_GENERATOR.jpg (32.61 KB, 下载次数: 0)
下载附件
2016-3-30 18:07 上传
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
/* USER CODE BEGIN 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();//初始化了NVIC分组及SysTick
/* Configure the system clock */
SystemClock_Config(); //配置时钟、校准了MSI、使能了SysTick 的中断
/* Initialize all configured peripherals */
MX_GPIO_Init();//开了GPIOA、GPIOC的时钟
MX_DMA_Init();//开DMA1时钟,设置DMA1 channel2的NVIC分组与使能
MX_TIM2_Init();//TIM2的初始化,GPIO设置、PWM配置、DMA设置
/* USER CODE END 1 */
/**
* @brief Configure the Flash prefetch, the Instruction and Data caches,
* the time base source, NVIC and any required global low level hardware
* by calling the HAL_MspInit() callback function to be optionally defined in user file
* stm32l4xx_hal_msp.c.
*
* @note HAL_Init() function is called at the beginning of program after reset and before
* the clock configuration.
*
* @note In the default implementation the System Timer (Systick) is used as source of time base.
* The Systick configuration is based on MSI clock, as MSI is the clock
* used after a system Reset and the NVIC configuration is set to Priority group 4.
* Once done, time base tick starts incrementing: the tick variable counter is incremented
* each 1ms in the SysTick_Handler() interrupt handler.
*
* @retval HAL status
*/
HAL_StatusTypeDef HAL_Init(void)
{
/* Configure Flash prefetch, Instruction cache, Data cache */
/* Default configuration at reset is: */
/* - Prefetch disabled */
/* - Instruction cache enabled */
/* - Data cache enabled */
#if (INSTRUCTION_CACHE_ENABLE == 0)
__HAL_FLASH_INSTRUCTION_CACHE_DISABLE();
#endif /* INSTRUCTION_CACHE_ENABLE */
#if (DATA_CACHE_ENABLE == 0)
__HAL_FLASH_DATA_CACHE_DISABLE();
#endif /* DATA_CACHE_ENABLE */
#if (PREFETCH_ENABLE != 0)
__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
#endif /* PREFETCH_ENABLE */
/* Set Interrupt Group Priority */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);
/* Use SysTick as time base source and configure 1ms tick (default clock after Reset is MSI) */
HAL_InitTick(TICK_INT_PRIORITY);
/* Init the low level hardware */
HAL_MspInit();
/* Return function status */
return HAL_OK;
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSE|RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.LSEState = RCC_LSE_ON;
RCC_OscInitStruct.MSIState = RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue = 0;
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_11;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_MSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV8;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV8;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2);
__PWR_CLK_ENABLE();
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
HAL_RCCEx_EnableMSIPLLMode();
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__GPIOC_CLK_ENABLE();
__GPIOA_CLK_ENABLE();
}
/**
* Enable DMA controller clock
*/
void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
HAL_NVIC_SetPriority(DMA1_Channel2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel2_IRQn);
}
/* TIM2 init function */
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig;
TIM_MasterConfigTypeDef sMasterConfig;
TIM_OC_InitTypeDef sConfigOC;
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;//时钟为总线时钟 12M,不分频
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1199; //产生5Khz的PWM
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_Base_Init(&htim2); //下面有贴出此函数并对其调用函数分析与修改
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;//没用,可注释掉
HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig);//没用,可注释掉
HAL_TIM_PWM_Init(&htim2);//没用,可注释掉
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;//没用,可注释掉
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;//没用,可注释掉
HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig);//没用,可注释掉
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 600; //占空比为50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1);
}
/**
* @brief Initializes the TIM Time base Unit according to the specified
* parameters in the TIM_HandleTypeDef and initialize the associated handle.
* @param htim: TIM Base handle
* @retval HAL status
*/
HAL_StatusTypeDef HAL_TIM_Base_Init(TIM_HandleTypeDef *htim)
{
/* Check the TIM handle allocation */
if(htim == NULL)
{
return HAL_ERROR;
}
/* Check the parameters */
assert_param(IS_TIM_INSTANCE(htim->Instance));
assert_param(IS_TIM_COUNTER_MODE(htim->Init.CounterMode));
assert_param(IS_TIM_CLOCKDIVISION_DIV(htim->Init.ClockDivision));
if(htim->State == HAL_TIM_STATE_RESET)
{
/* Allocate lock resource and initialize it */
htim->Lock = HAL_UNLOCKED;
/* Init the low level hardware : GPIO, CLOCK, NVIC */
HAL_TIM_Base_MspInit(htim);//下面来看看这个函数
}
/* Set the TIM state */
htim->State= HAL_TIM_STATE_BUSY;
/* Set the Time Base configuration */
TIM_Base_SetConfig(htim->Instance, &htim->Init);//此函数里有"Generate an update event to reload the Prescaler"
/* Initialize the TIM state*/
htim->State= HAL_TIM_STATE_READY;
return HAL_OK;
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(htim_base->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* Peripheral clock enable */
__TIM2_CLK_ENABLE();
/**TIM2 GPIO Configuration
PA0 ------> TIM2_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* Peripheral DMA init*/
hdma_tim2_up.Instance = DMA1_Channel2;
hdma_tim2_up.Init.Request = DMA_REQUEST_4;
hdma_tim2_up.Init.Direction = DMA_MEMORY_TO_PERIPH;//在这里修改一下方向,生成的代码里为“DMA_PERIPH_TO_MEMORY”
hdma_tim2_up.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim2_up.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim2_up.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;//这里可根据寄存器情况修改为HALFWORD 或BYTE
hdma_tim2_up.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;//
hdma_tim2_up.Init.Mode = DMA_NORMAL;
hdma_tim2_up.Init.Priority = DMA_PRIORITY_LOW;
HAL_DMA_Init(&hdma_tim2_up);
__HAL_LINKDMA(htim_base,hdma[TIM_DMA_ID_UPDATE],hdma_tim2_up);
/* USER CODE BEGIN TIM2_MspInit 1 */
/* USER CODE END TIM2_MspInit 1 */
}
}
5.3 需要另外做的工作
有空再写,睡觉了........
5.3 需要另外做的工作
初始化后,调用如下两个函数,重点说说如下两个函数。
HAL_TIM_DMABurst_WriteStart(&htim2, TIM_DMABASE_ARR, TIM_DMA_UPDATE,
(uint32_t*)aSRC_Buffer, TIM_DMABURSTLENGTH_3TRANSFERS);
//函数1,用来配置要传送的目标外设寄存器起始地址,这里配置为:TIM_DMABASE_ARR,即从自动重加载寄存器开始写,产生DMA请求的事件配置为:TIM_DMA_UPDATE 即定时器更新事件产生DMA请求,接下来是要传送的源数据起始地址,设置成要发送的数据数组的首地址,然后是DMA连续传输的数据长度,配置为TIM_DMABURSTLENGTH_3TRANSFERS,即连续传输三组寄存器的值,可以理解为一次定时器一次DMA请求,DMA进行三次数据传输,分别写给了TIM_DMABASE_ARR起的三组寄存器。
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1); //使能比较匹配输出通道,使能定时器
看看第一个函数的原型及内部调用函数:
/**
* @brief Configure the DMA Burst to transfer Data from the memory to the TIM peripheral
* @param htim: TIM handle
* @param BurstBaseAddress: TIM Base address from when the DMA will starts the Data write
* This parameters can be on of the following values:
* @arg TIM_DMABASE_CR1
* @arg TIM_DMABASE_CR2
* @arg TIM_DMABASE_SMCR
* @arg TIM_DMABASE_DIER
* @arg TIM_DMABASE_SR
* @arg TIM_DMABASE_EGR
* @arg TIM_DMABASE_CCMR1
* @arg TIM_DMABASE_CCMR2
* @arg TIM_DMABASE_CCER
* @arg TIM_DMABASE_CNT
* @arg TIM_DMABASE_PSC
* @arg TIM_DMABASE_ARR
* @arg TIM_DMABASE_RCR
* @arg TIM_DMABASE_CCR1
* @arg TIM_DMABASE_CCR2
* @arg TIM_DMABASE_CCR3
* @arg TIM_DMABASE_CCR4
* @arg TIM_DMABASE_BDTR
* @arg TIM_DMABASE_DCR
* @param BurstRequestSrc: TIM DMA Request sources
* This parameters can be on of the following values:
* @arg TIM_DMA_UPDATE: TIM update Interrupt source
* @arg TIM_DMA_CC1: TIM Capture Compare 1 DMA source
* @arg TIM_DMA_CC2: TIM Capture Compare 2 DMA source
* @arg TIM_DMA_CC3: TIM Capture Compare 3 DMA source
* @arg TIM_DMA_CC4: TIM Capture Compare 4 DMA source
* @arg TIM_DMA_COM: TIM Commutation DMA source
* @arg TIM_DMA_TRIGGER: TIM Trigger DMA source
* @param BurstBuffer: The Buffer address.
* @param BurstLength: DMA Burst length. This parameter can be one value
* between: TIM_DMABurstLength_1Transfer and TIM_DMABurstLength_18Transfers.
* @retval HAL status
*/
HAL_StatusTypeDef HAL_TIM_DMABurst_WriteStart(TIM_HandleTypeDef *htim, uint32_t BurstBaseAddress, uint32_t BurstRequestSrc,
uint32_t* BurstBuffer, uint32_t BurstLength)//,uint16_t Bursttimes
{
/* Check the parameters */
assert_param(IS_TIM_DMABURST_INSTANCE(htim->Instance));
assert_param(IS_TIM_DMA_BASE(BurstBaseAddress));
assert_param(IS_TIM_DMA_SOURCE(BurstRequestSrc));
assert_param(IS_TIM_DMA_LENGTH(BurstLength));
if((htim->State == HAL_TIM_STATE_BUSY))
{
return HAL_BUSY;
}
else if((htim->State == HAL_TIM_STATE_READY))
{
if((BurstBuffer == 0 ) && (BurstLength > 0))
{
return HAL_ERROR;
}
else
{
htim->State = HAL_TIM_STATE_BUSY;
}
}
switch(BurstRequestSrc)
{
case TIM_DMA_UPDATE:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_UPDATE]->XferCpltCallback = TIM_DMAPeriodElapsedCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_UPDATE]->XferErrorCallback = TIM_DMAError ;
/* Enable the DMA channel */ //用来设置传输的源地址、目标地址、DMA传送次数及中断
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_UPDATE], (uint32_t)BurstBuffer, (uint32_t)&htim->Instance->DMAR, ((BurstLength) >> 8) + 1);//Bursttimes
}
break;
case TIM_DMA_CC1:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_CC1]->XferCpltCallback = TIM_DMADelayPulseCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_CC1]->XferErrorCallback = TIM_DMAError ;
/* Enable the DMA channel */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_CC1], (uint32_t)BurstBuffer, (uint32_t)&htim->Instance->DMAR, ((BurstLength) >> 8) + 1);
}
break;
case TIM_DMA_CC2:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_CC2]->XferCpltCallback = TIM_DMADelayPulseCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_CC2]->XferErrorCallback = TIM_DMAError ;
/* Enable the DMA channel */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_CC2], (uint32_t)BurstBuffer, (uint32_t)&htim->Instance->DMAR, ((BurstLength) >> 8) + 1);
}
break;
case TIM_DMA_CC3:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_CC3]->XferCpltCallback = TIM_DMADelayPulseCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_CC3]->XferErrorCallback = TIM_DMAError ;
/* Enable the DMA channel */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_CC3], (uint32_t)BurstBuffer, (uint32_t)&htim->Instance->DMAR, ((BurstLength) >> 8) + 1);
}
break;
case TIM_DMA_CC4:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_CC4]->XferCpltCallback = TIM_DMADelayPulseCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_CC4]->XferErrorCallback = TIM_DMAError ;
/* Enable the DMA channel */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_CC4], (uint32_t)BurstBuffer, (uint32_t)&htim->Instance->DMAR, ((BurstLength) >> 8) + 1);
}
break;
case TIM_DMA_COM:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_COMMUTATION]->XferCpltCallback = TIMEx_DMACommutationCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_COMMUTATION]->XferErrorCallback = TIM_DMAError ;
/* Enable the DMA channel */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_COMMUTATION], (uint32_t)BurstBuffer, (uint32_t)&htim->Instance->DMAR, ((BurstLength) >> 8) + 1);
}
break;
case TIM_DMA_TRIGGER:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_TRIGGER]->XferCpltCallback = TIM_DMATriggerCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_TRIGGER]->XferErrorCallback = TIM_DMAError ;
/* Enable the DMA channel */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_TRIGGER], (uint32_t)BurstBuffer, (uint32_t)&htim->Instance->DMAR, ((BurstLength) >> 8) + 1);
}
break;
default:
break;
}
/* configure the DMA Burst Mode */
htim->Instance->DCR = BurstBaseAddress | BurstLength;//这里设置的是DBL和DBA
/* Enable the TIM DMA Request */
__HAL_TIM_ENABLE_DMA(htim, BurstRequestSrc);
htim->State = HAL_TIM_STATE_READY;
/* Return function status */
return HAL_OK;
}
此函数中,只有第一个case语句及函数最后几句对我们有用。先看一个case语句中的调用函数
/**
* @brief Start the DMA Transfer with interrupt enabled.
* @param hdma: pointer to a DMA_HandleTypeDef structure that contains
* the configuration information for the specified DMA Channel.
* @param SrcAddress: The source memory Buffer address
* @param DstAddress: The destination memory Buffer address
* @param DataLength: The length of data to be transferred from source to destination
* @retval HAL status
*/
HAL_StatusTypeDef HAL_DMA_Start_IT(DMA_HandleTypeDef *hdma, uint32_t SrcAddress, uint32_t DstAddress, uint32_t DataLength)
{
/* Process locked */
__HAL_LOCK(hdma);
/* Change DMA peripheral state */
hdma->State = HAL_DMA_STATE_BUSY;
/* Check the parameters */
assert_param(IS_DMA_BUFFER_SIZE(DataLength));
/* Disable the peripheral */
__HAL_DMA_DISABLE(hdma);
/* Configure the source, destination address and the data length */
DMA_SetConfig(hdma, SrcAddress, DstAddress, DataLength);//设置源地址、目标地址、DMA传输次数
/* Enable the transfer complete interrupt */
/* Enable the Half transfer complete interrupt */
/* Enable the transfer Error interrupt */
__HAL_DMA_ENABLE_IT(hdma, DMA_IT_TC);// | DMA_IT_HT | DMA_IT_TE 只开DMA传输完成中断,不开半传输中断及错误中断
/* Enable the Peripheral */
__HAL_DMA_ENABLE(hdma);
return HAL_OK;
}
其中函数:
/* Configure the source, destination address and the data length */
DMA_SetConfig(hdma, SrcAddress, DstAddress, DataLength);//设置源地址、目标地址、DMA传输次数,这里有两个比较难以理解的寄存器,TIMx_DMAR和TIMx_DCR,不要去看TIM2的寄存器,去看TIM1的对应寄存器,应为后者讲的更详细些,数据手册如下:
5.jpg (52.23 KB, 下载次数: 0)
下载附件
2016-4-1 16:53 上传
有成果了吧..........
本着求真、务实、讲科学的态度,还要进行验证测试
为了验证产生的5个脉冲信号是不是我们通过DMA传输的数据,我们产生三种规占空比的脉冲,修改如下:
uint32_t aSRC_Buffer[15] = {1199, 0,1000,
1199, 0,600,
1199, 0,100,
1199, 0,600,
1199, 0,1000,
};
HAL_TIM_DMABurst_WriteStart(&htim2, TIM_DMABASE_ARR, TIM_DMA_UPDATE,
(uint32_t*)aSRC_Buffer, TIM_DMABURSTLENGTH_3TRANSFERS,15);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
在DMA传输完成中断里添加:
HAL_TIM_PWM_Stop(&htim2, TIM_CHANNEL_1);//停止脉冲输出及TIM2
编译,下载,观测:
22.jpg (16.09 KB, 下载次数: 0)
下载附件
2016-4-3 00:14 上传
波形对了,但是数量少了两个,为何???可以从上述分析为何前两个脉冲不对的原因中找到答案。
可以不再DMA传输完成中断里关闭定时器,让定制器一直开着,在DMA传输数据里关闭CH1的输出,但还是解决不了少两个的问题,不过,知其原因,抓此规律,可以满足产生数量可控、频率可调、占空比可调的PWM波了........
开始搞伺服电机控制了,此贴结贴,以后只回复问题,不再更新。
各位看官、朋友、大侠、做过伺服或步进控制的前辈们,谁能提供一个可用的MATLAB的安装程序???若能讲解一下如何做电机加减速的曲线拟合就更好了,可以一块把本帖打造成伺服或步进控制的精华帖,功德无量,好人一生平安
一周热门 更多>