{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 12tangyang12 的问题《初学者关于PID整定的问题》','https://www.xiaopingtou.net/q-163447.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
最近在研究PID整定,于是乎拿了51单片机配上ds18b20加热电阻 控制加热温度,
在论坛找到了关于pid有位置式和 增量式,听说增量式pid更优越。
于是准备调,
PID公式如下
int Error=0,Inc=0; //误差,增量
Error=sptr->SetPoint-Temp;
Inc=(int)(sptr->Proportion*(float)(Error)-
sptr->Integral*(float)(sptr->LastError)+
sptr->Derivative*(float)(sptr->PrevError));
sptr->PrevError=sptr->LastError;
sptr->LastError=Error;
return Inc;
在将KI KD 取0 的情况下 取了三个不同大小的KP效果如下:
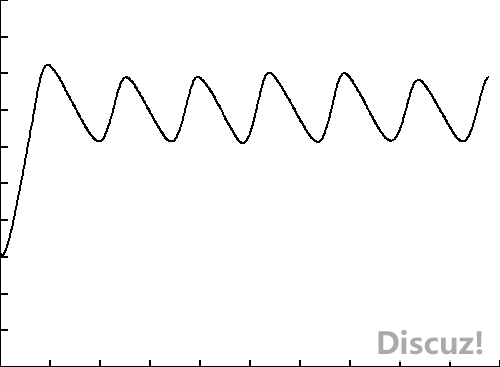 KP10-KI0-KD0.jpg (23.13 KB, 下载次数: 0)
下载附件
KP=10,KI=0,KD=0
2014-1-13 15:05 上传
KP10-KI0-KD0.jpg (23.13 KB, 下载次数: 0)
下载附件
KP=10,KI=0,KD=0
2014-1-13 15:05 上传
KP=10,KI=0,KD=0
这三个效果 那个更好呢? 还有就是需要将KP调节到什么程度才能调节ki kd?
在论坛找到了关于pid有位置式和 增量式,听说增量式pid更优越。
于是准备调,
PID公式如下
int Error=0,Inc=0; //误差,增量
Error=sptr->SetPoint-Temp;
Inc=(int)(sptr->Proportion*(float)(Error)-
sptr->Integral*(float)(sptr->LastError)+
sptr->Derivative*(float)(sptr->PrevError));
sptr->PrevError=sptr->LastError;
sptr->LastError=Error;
return Inc;
在将KI KD 取0 的情况下 取了三个不同大小的KP效果如下:
KP10-KI0-KD0.jpg (23.13 KB, 下载次数: 0)
下载附件
KP=10,KI=0,KD=0
2014-1-13 15:05 上传
这三个效果 那个更好呢? 还有就是需要将KP调节到什么程度才能调节ki kd?
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
一周热门 更多>