{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 ivws 的问题《软件摸拟EV1527编码IC 【恢复】》','https://www.xiaopingtou.net/q-169366.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
点击此处下载 ourdev_449590.pdf(文件大小:332K) (原文件名:EV1527.pdf)
点击此处下载 ourdev_449591.pdf(文件大小:340K) (原文件名:F05P.pdf)
点击此处下载 ourdev_449592.rar(文件大小:28K) (原文件名:16F84A F05P.rar)
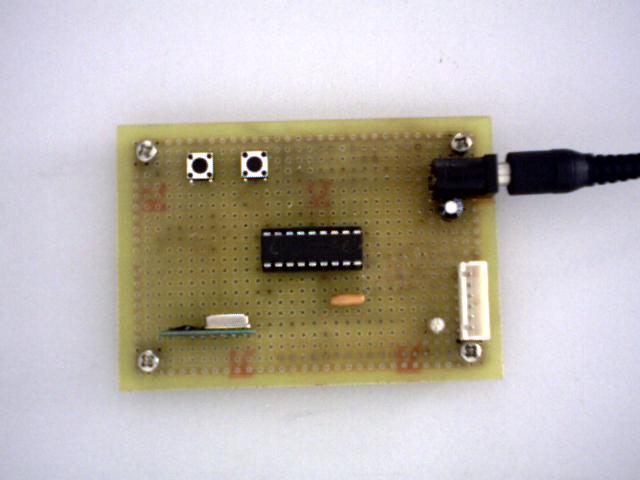
(原文件名:00.jpg)
(原文件名:01.jpg)
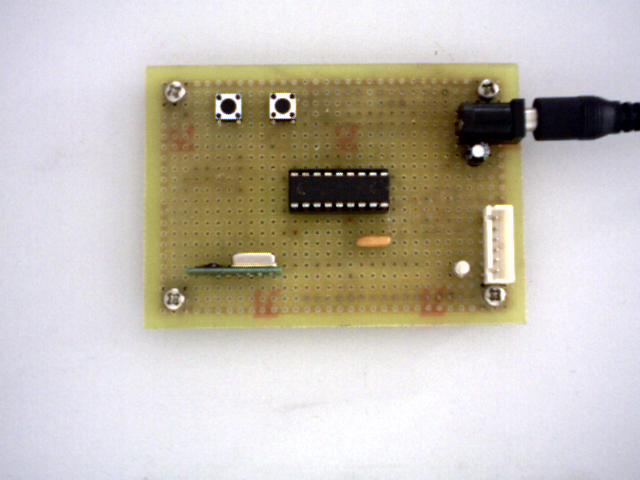
(原文件名:02.jpg)
EV1527的编码格式和PT2262的差不多...只要修改按键数据部份就可以控制PT2272...
//引入头文件*********************************************************
#include "delay.h"
#include "delay.c"
#include <pic1684.h>
//时间常数***********************************************************
#define RcOsc 910 //脉冲总宽
//脚位定义***********************************************************
#define Led RA0 //指示输出
//数据输出***********************************************************
#define Out RA1 //数据输出
//按键数据***********************************************************
unsigned char value = 3; //按键的值
//*******************************************************************
//函数名称:port_init();
//输入参数:无
//输出参数:无
//功能描述:端口设置
//建造日期:2008.10.11
//*****************************************************************
void PortInit(void)
{
OPTION = 0x00; //允许上拉
PORTA = 0xfc; //
TRISA = 0xfc; //A 口设置
PORTB = 0xff; //
TRISB = 0xff; //B 口设置
}
//*******************************************************************
//函数名称:TxSycn();
//输入参数:无
//输出参数:无
//功能描述:发送同步头
//建造日期:2008.10.11
//*******************************************************************
void TxSycn(void)
{
Out = 1; //同步数据
DelayUs(RcOsc / 16 * 4);
Out = 0;
DelayMs(RcOsc / 16 * 124 / 1000);
}
//*******************************************************************
//函数名称:TxByte(data);
//输入参数:待发数据
//输出参数:无
//功能描述:发送一字节数据
//建造日期:2008.10.11
//*******************************************************************
void TxByte(unsigned char data)
{
unsigned char i;
for (i = 0; i < 8; i++)
{
if (data & 0x01) //发送高位
{
Out = 1; //高位数据
DelayUs(RcOsc / 16 * 12);
Out = 0;
DelayUs(RcOsc / 16 * 4);
}
else //发送低位
{
Out = 1; //低位数据
DelayUs(RcOsc / 16 * 4);
Out = 0;
DelayUs(RcOsc / 16 * 12);
}
data>>= 1; //右移一位
}
}
//*******************************************************************
//函数名称:TxData(data);
//输入参数:按键数据
//输出参数:无
//功能描述:发送数据
//建造日期:2008.10.11
//*******************************************************************
void TxData(unsigned char data)
{
unsigned char buff[3] = {0xaa, 0x3c, 0x03};
unsigned char i, j;
buff[2] &= 0x0f; //清除按键
buff[2] |= data; //加载按键
for (j = 0; j < 4; j++) //每帆四次
{
TxSycn(); //送同步头
for (i = 0; i < 3; i++)
{
TxByte(buff); //发送数据
}
}
}
//*******************************************************************
//函数名称:KeyRead();
//输入参数:无
//输出参数:无
//功能描述:读取按键
//建造日期:2008.10.11
//*******************************************************************
void KeyRead(void)
{
static unsigned char temp = 0; //临时记录
static unsigned char read = 0; //按键记录
static unsigned char sign = 0; //状态标志
static unsigned char time = 0; //防误记时
temp = PORTB & 0x03; //读取按键
if (sign == 0)
{
if (read == temp) //是否稳定
{
if (++time> 50) //防误处理
{
time = 0; //记时清零
sign = 1; //下个状态
value = read; //有效按键
}
}
else time = 0; //从新记时
}
else if (temp == 0x03) sign = 0; //等待弹起
read = temp; //更新记录
}
//*******************************************************************
//函数名称:KeyInt();
//输入参数:无
//输出参数:无
//功能描述:按键处理
//建造日期:2008.10.11
//*******************************************************************
void KeyInt(void)
{
if (value != 3) //是否有效
{
switch (value)
{
case 0B00000010: //1 号按键
{
Led = 1;
TxData(0x80);
Led = 0;
break;
}
case 0B00000001: //2 号按键
{
Led = 1;
TxData(0x40);
Led = 0;
break;
}
case 0B00000000: //复合按键
{
Led = 1;
TxData(0xc0);
Led = 0;
break;
}
default: //无效离开
{
break;
}
}
value = 3; //执行一次
}
}
//*******************************************************************
//函数名称:main();
//输入参数:无
//输出参数:无
//功能描述:主要程序
//建造日期:2008.10.11
//*******************************************************************
void main(void) //
{
PortInit(); //脚位设置
while (1)
{
DelayMs(1); //
KeyRead(); //读取按键
KeyInt(); //按键处理
}
}
点击此处下载 ourdev_449591.pdf(文件大小:340K) (原文件名:F05P.pdf)
点击此处下载 ourdev_449592.rar(文件大小:28K) (原文件名:16F84A F05P.rar)
(原文件名:00.jpg)
(原文件名:01.jpg)
(原文件名:02.jpg)
EV1527的编码格式和PT2262的差不多...只要修改按键数据部份就可以控制PT2272...
//引入头文件*********************************************************
#include "delay.h"
#include "delay.c"
#include <pic1684.h>
//时间常数***********************************************************
#define RcOsc 910 //脉冲总宽
//脚位定义***********************************************************
#define Led RA0 //指示输出
//数据输出***********************************************************
#define Out RA1 //数据输出
//按键数据***********************************************************
unsigned char value = 3; //按键的值
//*******************************************************************
//函数名称:port_init();
//输入参数:无
//输出参数:无
//功能描述:端口设置
//建造日期:2008.10.11
//*****************************************************************
void PortInit(void)
{
OPTION = 0x00; //允许上拉
PORTA = 0xfc; //
TRISA = 0xfc; //A 口设置
PORTB = 0xff; //
TRISB = 0xff; //B 口设置
}
//*******************************************************************
//函数名称:TxSycn();
//输入参数:无
//输出参数:无
//功能描述:发送同步头
//建造日期:2008.10.11
//*******************************************************************
void TxSycn(void)
{
Out = 1; //同步数据
DelayUs(RcOsc / 16 * 4);
Out = 0;
DelayMs(RcOsc / 16 * 124 / 1000);
}
//*******************************************************************
//函数名称:TxByte(data);
//输入参数:待发数据
//输出参数:无
//功能描述:发送一字节数据
//建造日期:2008.10.11
//*******************************************************************
void TxByte(unsigned char data)
{
unsigned char i;
for (i = 0; i < 8; i++)
{
if (data & 0x01) //发送高位
{
Out = 1; //高位数据
DelayUs(RcOsc / 16 * 12);
Out = 0;
DelayUs(RcOsc / 16 * 4);
}
else //发送低位
{
Out = 1; //低位数据
DelayUs(RcOsc / 16 * 4);
Out = 0;
DelayUs(RcOsc / 16 * 12);
}
data>>= 1; //右移一位
}
}
//*******************************************************************
//函数名称:TxData(data);
//输入参数:按键数据
//输出参数:无
//功能描述:发送数据
//建造日期:2008.10.11
//*******************************************************************
void TxData(unsigned char data)
{
unsigned char buff[3] = {0xaa, 0x3c, 0x03};
unsigned char i, j;
buff[2] &= 0x0f; //清除按键
buff[2] |= data; //加载按键
for (j = 0; j < 4; j++) //每帆四次
{
TxSycn(); //送同步头
for (i = 0; i < 3; i++)
{
TxByte(buff); //发送数据
}
}
}
//*******************************************************************
//函数名称:KeyRead();
//输入参数:无
//输出参数:无
//功能描述:读取按键
//建造日期:2008.10.11
//*******************************************************************
void KeyRead(void)
{
static unsigned char temp = 0; //临时记录
static unsigned char read = 0; //按键记录
static unsigned char sign = 0; //状态标志
static unsigned char time = 0; //防误记时
temp = PORTB & 0x03; //读取按键
if (sign == 0)
{
if (read == temp) //是否稳定
{
if (++time> 50) //防误处理
{
time = 0; //记时清零
sign = 1; //下个状态
value = read; //有效按键
}
}
else time = 0; //从新记时
}
else if (temp == 0x03) sign = 0; //等待弹起
read = temp; //更新记录
}
//*******************************************************************
//函数名称:KeyInt();
//输入参数:无
//输出参数:无
//功能描述:按键处理
//建造日期:2008.10.11
//*******************************************************************
void KeyInt(void)
{
if (value != 3) //是否有效
{
switch (value)
{
case 0B00000010: //1 号按键
{
Led = 1;
TxData(0x80);
Led = 0;
break;
}
case 0B00000001: //2 号按键
{
Led = 1;
TxData(0x40);
Led = 0;
break;
}
case 0B00000000: //复合按键
{
Led = 1;
TxData(0xc0);
Led = 0;
break;
}
default: //无效离开
{
break;
}
}
value = 3; //执行一次
}
}
//*******************************************************************
//函数名称:main();
//输入参数:无
//输出参数:无
//功能描述:主要程序
//建造日期:2008.10.11
//*******************************************************************
void main(void) //
{
PortInit(); //脚位设置
while (1)
{
DelayMs(1); //
KeyRead(); //读取按键
KeyInt(); //按键处理
}
}
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
========code==========
unsigned char ev1257_send(unsigned long frame_32) {
unsigned long mask=0x00800000; //send the highest bit first
do {
if (frame_32 & mask) ev1257_send_one(); //send 1
else ev1257_send_zero(); //send 0
mask = mask >> 1; //prepare for the next bit
while (mask);
return 1;
}
=======end code=========
you can then write ev1257_send_one/zero() as two inline routines to speed up the execution.
一周热门 更多>