{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 rainbow 的问题《开源蜘蛛-老陈手上的这个也能走了!已更新视频!》','https://www.xiaopingtou.net/q-174445.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
本帖最后由 rainbow 于 2014-9-10 10:24 编辑
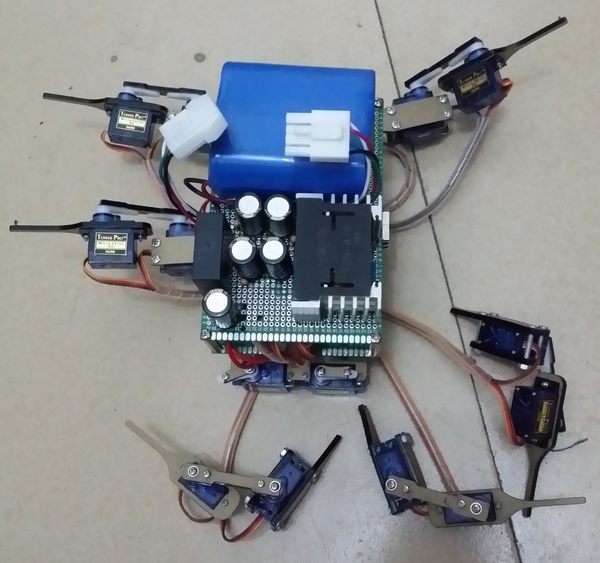
今晚用傻孩子的最新程序模板,根据我的装配状态,经过一番偏移调整,已经可以动起来了,没有傻孩子的那么流畅。
先用外部稳压电源试机,走的有点得瑟,像是五老二,此时整机工作电流在1.2~1.7A(@5V)之间变化。
加上电池,背上电池后,电流增加1A左右,即2.2~2.7A。
取下稳压电源的红线,用电池供电,刚动两下,结果悲剧了,脆弱的两条后腿咔嚓咔嚓折了,只能用其它的四条腿在爬,有点像是终结者里的那个打残的机器人。
好的这成功与悲惨的过程压都被我用手机拍了下来,视频等白天去公司再上传,现在用手机不方便。
在此再次感谢莫生、傻孩子、飞思卡尔和各位朋友的支持与鼓励。
后面我会重新设计更强蜘蛛的结构,用更大的舵机,能负重2-3Kg,绝不能再如此脆弱。
视频来了!
http://v.youku.com/v_show/id_XNzc4NDA0NzM2.html
http://v.youku.com/v_show/id_XNzc4NDA0NzY0.html
http://v.youku.com/v_show/id_XNzc4NDA0NzYw.html
先上一张折腿图(已更新为清晰睛):
 总重量.jpg (228.8 KB, 下载次数: 0)
下载附件
2014-9-10 10:07 上传
总重量.jpg (228.8 KB, 下载次数: 0)
下载附件
2014-9-10 10:07 上传
今晚用傻孩子的最新程序模板,根据我的装配状态,经过一番偏移调整,已经可以动起来了,没有傻孩子的那么流畅。
先用外部稳压电源试机,走的有点得瑟,像是五老二,此时整机工作电流在1.2~1.7A(@5V)之间变化。
加上电池,背上电池后,电流增加1A左右,即2.2~2.7A。
取下稳压电源的红线,用电池供电,刚动两下,结果悲剧了,脆弱的两条后腿咔嚓咔嚓折了,只能用其它的四条腿在爬,有点像是终结者里的那个打残的机器人。
好的这成功与悲惨的过程压都被我用手机拍了下来,视频等白天去公司再上传,现在用手机不方便。
在此再次感谢莫生、傻孩子、飞思卡尔和各位朋友的支持与鼓励。
后面我会重新设计更强蜘蛛的结构,用更大的舵机,能负重2-3Kg,绝不能再如此脆弱。
视频来了!
http://v.youku.com/v_show/id_XNzc4NDA0NzM2.html
http://v.youku.com/v_show/id_XNzc4NDA0NzY0.html
http://v.youku.com/v_show/id_XNzc4NDA0NzYw.html
先上一张折腿图(已更新为清晰睛):
总重量.jpg (228.8 KB, 下载次数: 0)
下载附件
2014-9-10 10:07 上传
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
TowerPro 996R,下面是数据:
以下是专业测试数据:
产品尺寸: 40.7*19.7*42.9mm
产品拉力: 12kg/cm(6V)
反应速度: 0.17sec/60度(4.8v无负载)0.14sec/60度(6v无负载)
工作电压: 4.8-6V
工作温度: 0℃-55℃
齿轮形式: 金属齿轮
工作死区: 5us (微秒)
图片(来自淘宝):
996R.jpg (185.47 KB, 下载次数: 0)
下载附件
2014-9-10 11:45 上传
脚上带个套套会不会好点,起码不会打滑
洞洞板是很结实的,双面的FR4,JLC买的。
是大腿的那片压克力板强度太差了。
一周热门 更多>